SCENE 1: Title panel featuring logo and inset faces of main characters Martha, Flip, Bit, and Martha’s boss Mel. TITLE: Learning MACHINE LEARNING CAPTION (shape of arrow): Starring MARTHA The Overworked Engineer! MARTHA: Are we getting time-and-a-half for this? NARRATOR: With FLIP... NARRATOR: ...and BIT! CAPTION (shape of arrow): ... And MEL, the World’s Worst Boss MEL: I don’t know ANYTHING! NARRATOR: An online comic from Google AI
SCENE 2: An engineer, MARTHA, mid 30s, is working in an office cubicle when her smiling boss MEL leans over the partition to get her attention. NARRATOR: SOMEWHERE IN ENGINEERING... BOSS: Martha! I have a little project for you. MARTHA: Hey, it’s Raheem’s turn to feed the salamanders!
SCENE 3: Martha looks apprehensively over her shoulder at Mel who makes air quotes with his fingers as he speaks. BOSS: So... our VP heard about MACHINE LEARNING and wants us to “add it to everything.” Can you lead that effort? MARTHA: Machine learning? That’s not exactly my area of exper—
SCENE 4: Mel pops away in a cloud of cartoon smoke, only the phone in his hand still visible, before Martha can protest. BOSS: Okay good luck gotta hop on a call kthx bye! MARTHA: But—

SCENE 5: Distraught and clutching her forehead, Martha paces the halls talking to herself, desperately working through her options. A tall male coworker looks quizzically as she passes. A female coworker, eyes on her phone, wryly answers Martha’s rhetorical question. MARTHA: Oh no. Is there even anyone here with machine learning experience? Gotta be someone... CO-WORKER: ha ha At THIS place?
SCENE 6: Martha, still lost in thought, resigned to her fate, passes a doorway with a large sign on it. MARTHA: Great... Ten more white papers, here I come... SIGN ON DOOR: MYSTERIOUS DOOR THAT DEFINITELY WASN’T HERE THIS MORNING.

SCENE 7: Martha is brought up short, suddenly noticing the sign. [SIGN AGAIN] MARTHA: Wait—what??
SCENE 8: From inside a darkened room, we see Martha entering the doorway in the background. In foreground, large unidentifiable shapes (figures?) loom. MARTHA: Hello? Is somebody there?
SCENE 9: Two mechanical hands clap in the dark, startling Martha. SOUND F/X: CLAP CLAP!

SCENE 10: The lights come on, and two figures are revealed: BIT, a hovering ball-shaped robot about the size of a softball with flexible segmented arms, claw-like hands, and a single antenna, and... FLIP, a tuxedo patterned cat, sitting on a three platform cat tree tower. Martha, in foreground, looks disoriented. BIT: Sorry about that! FLIP: Somebody forgot that humans can’t see in the dark. MARTHA: ... okay, did I just hit my head or something?

SCENE 11: Bit circles Martha’s head as Flip jumps on her shoulders. Martha, half-recovered, tries to respond to them. BIT: No, this is actually happening! Our model predicted you’d need some machine learning answers about now. I’m BIT, by the way. FLIP: And I’m FLIP. Tell us... What do you think ML is, Tragically Under-Spec’d Human? MARTHA: Uh... Name’s Martha...
SCENE 12: Martha and Bit in discussion. As Martha ponders what she knows about machine learning, small icons appear in a thought balloon representing various perceived sub- fields of artificial intelligence. MARTHA: Machine learning is a sub-field of artificial intelligence, right? Along with image recognition, language processing, recommenders, self-driving cars, and... uh... ... Time-traveling Schwarzenegger’s...? Taunting Keanu Reeves...?? BIT: You got the first part right!
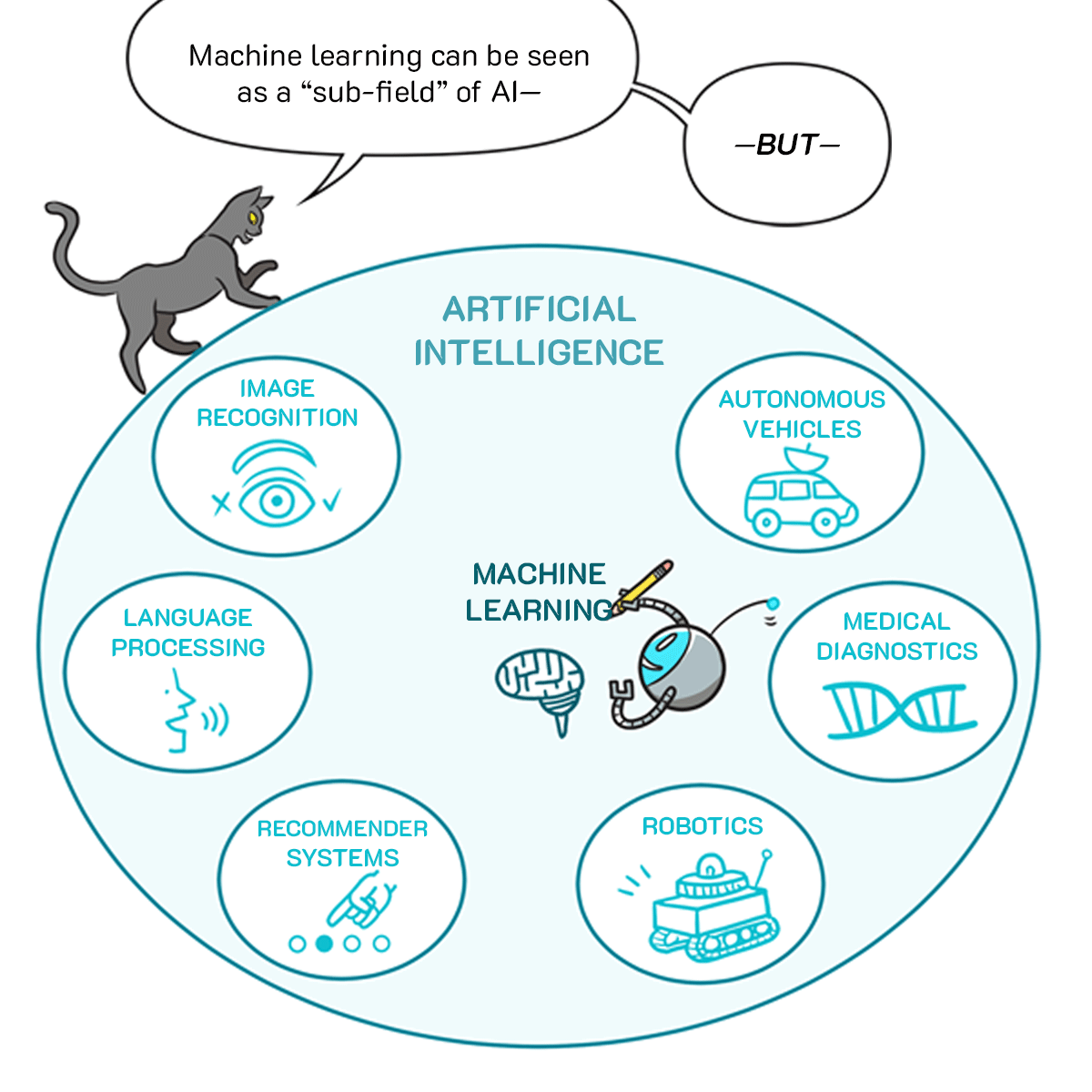
SCENE 13: Flip walks the periphery of a large oval chart showing those subfields of A.I. as smaller ovals (subsets) of the enclosing group labeled “artificial intelligence.” Between the ovals, at the center of the big A.I. set, Bit writes “Machine Learning.” LABELS: ARTIFICIAL INTELLIGENCE MACHINE LEARNING IMAGE RECOGNITION LANGUAGE PROCESSING RECOMMENDER SYSTEMS ROBOTICS MEDICAL DIAGNOSTICS AUTONOMOUS VEHICLES FLIP: Machine learning can be seen as a “sub-field” of AI— —BUT—
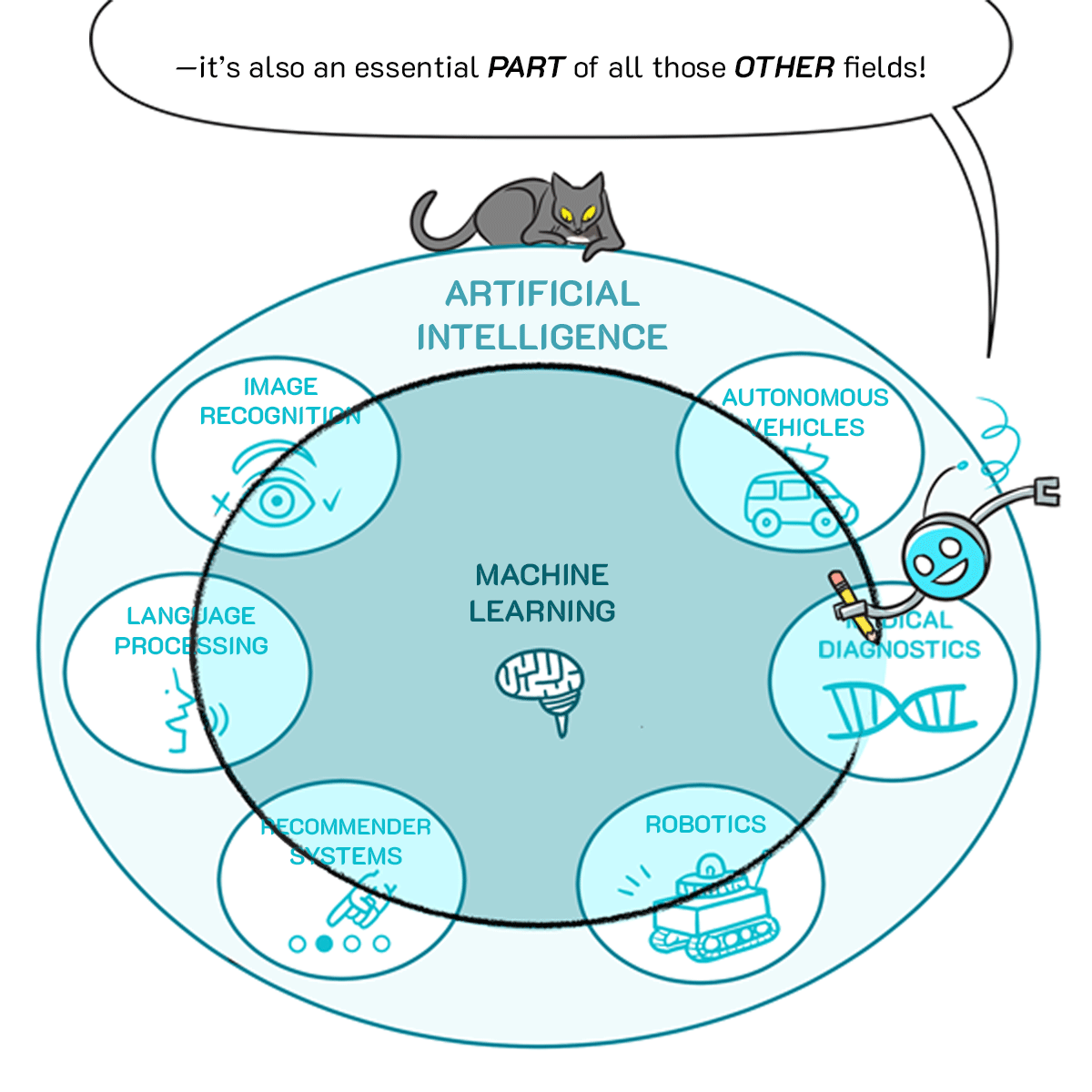
SCENE 14: The chart remains, though now the sub-fields are represented with just a symbol for each. Bit draws a large oval that includes machine learning but also bisects each of the subfields, showing that ML is overlapping nearly all the sub-fields. LABELS: ARTIFICIAL INTELLIGENCE MACHINE LEARNING BIT: —it’s also an essential PART of all those OTHER fields!
SCENE 15: Martha close up, pondering. Both interlocutors engage her. FLIP: Machine learning is when computers IMPROVE at a task based on EXPERIENCE at that task, but without explicit programming. BIT: In other words, computers finally starting to take the initiative in ways they rarely have before. MARTHA: Hunh.

SCENE 16: Long-shot of a timeline from the late 1950s to the mid-2020s (i.e., overlapping the future a bit). Bit holds a portrait of Arthur Samuel back in the late ‘50s. Martha sits in the present day as Flip runs about. Different milestones in computing from the significant to the trivial can be seen underneath them. BIT: Arthur Samuel at IBM coined the term “machine learning” way back in 1959, just a few years after Alan Turing started talking “artificial intelligence.” MARTHA: Hold on. If machine learning has been around that long, why is it such a buzzword now? TIMELINE LABELS: SAMUEL COINS “MACHINE LEARNING” ARPANET TCP/IP MICROSOFT APPLE WWW MOSAIC GOOGLE FACEBOOK TWITTER CALL ME MAYBE SHARKNADO MOON EXPLODES TAYLOR SWIFT ELECTED PRESIDENT (last label mostly obscured)

SCENE 17: Bit gestures to a cyclical diagram with a lightbulb (“insights") a GPU ("hardware”) and binary digits (“data”). Martha looks at the diagram as Flip looks at Martha. BIT: New engineering insights, well-curated big datasets, and hardware that can keep pace have all converged to make today’s ML shine! FLIP: And by “shine” he means it can produce useful results before the heat death of the universe.
SCENE 18: Martha gestures skeptically, a little scripting symbol floats over her left hand. Bit and Flip continue to explain. MARTHA: That’s cool and all but “...without explicit programming” sounds fishy... I mean, it’s all in the code somewhere. How is ML different from the way I program now? FLIP: ML is powered by data, not instructions. We’ll show you. Hey, Bit—ML Metaphor Mode! BIT: Sure thing!

SCENE 19: Flip, a fork suddenly in her mouth, jumps off of Martha and onto a waist-height podium appearing centerstage. Bit rises with a whirl and turns blank-eyed, ready for his “metaphor mode” demo. FLIP: Let’s try some classification. We can start with... ...this fork! MARTHA (small letters): Where were you hiding that?

SCENE 20: Flip, sitting on the podium, raises a common table fork in her paw. Bit confidently responds. FLIP: Okay, buddy. This right here? This is a fork. Got it? BIT: Got it! A fork.
SCENE 21: Flip now raises a small toy car. Bit, with equal confidence, responds again. FLIP: Now what is this? BIT: Based on what you’ve told me, I am 100% confident that this is... ... a FORK!

SCENE 22: Zoom back slightly to show Martha with arms crossed, skeptical. Flip looks back at Martha. Bit smiles obliviously. MARTHA: Yeah, I’m... not impressed.

SCENE 23: Flip returns her gaze to Bit and offers the correction, which Bit acknowledges. FLIP: Sorry, amigo. It’s not a fork. BIT: Oh. Gotcha! Not a fork!

SCENE 24: Flip raises a differently-styled (wooden), three-tined fork. Bit responds. Martha, again, is skeptical. FLIP: Now what’s this? BIT: I am... 80% certain that’s a fork. MARTHA: Pft. But that’s easy. I can do that without ML, and with 100% accuracy.
SCENE 25: Martha confidently recites string of code to do the job. Flip looks mischievous. Bit floats nearby not listening, happily contemplating forks and spoons. MARTHA (Code in Word Balloon): if ((thing.isStainlessSteel() OR Thing.isWood()) AND (thing.hasFourTines() OR Thing.hasThreeTines()) {isFork(); }else {isNotFork(); } FLIP: Okay, fair enough...
SCENE 26: A giant table fork plunges down between Martha and Flip. Martha struggles to move the fork as Bit continues happily floating about with utensils. FLIP: ...but now do that for every type of FORK in the world: Plastic forks, antique forks, two-tined forks, five-tined forks, giant forks, glass forks... MARTHA: Uh...no! I’d have to write out all the possible characteristics that make something a fork. To define “forkiness” itself!

SCENE 27: The giant fork lifts back out of the panel as the tip of a rope descends. FLIP: Exactly! But with ML, if you have enough well-curated data— —and run it through enough training and testing...

SCENE 28: Flip confidently pulls on the rope, decorated with a sign, and dozens of kitchen utensils and appliances (including spatulas, bowls, blenders, cops, calendars, pepper shakers, mugs, orange squeezers, eggbeaters, toasters, spoons, and forks) all tumble from the sky; each of them labeled as either “fork” or “not fork.” Bit is happily surrounded by the falling objects. Martha is surprised. SIGN: PULL FOR LABELED DATA BIT: Woohoo!
SCENE 29: Martha looks on as Flip shows Bit a plastic spork. Bit, with concentration, offers his response. FLIP: Ahem. Can you guess what this is, buddy? BIT: Hm. I’m 93.4% sure that’s a fork.

SCENE 30: Long shot of the three conferring. Flip hops off the podium. MARTHA: Okay, I’m starting to see your point. BIT: Obviously, there’s a lot more to it in real life, and ML covers more than just classification... FLIP: But on the whole, ML’s data-centric approach makes it great at learning by example, finding patterns in data, and predicting outcomes.

SCENE 31: Martha, quizzical again with arms crossed. Bit response to Martha. Flip comments to Bit. MARTHA: Sounds great, but how can a machine “learn,” exactly? BIT: So, let’s say you want to predict the prices of houses in Portland, Oregon... MARTHA: Hold on. Does it have to be Portland? These examples are always in Portland. FLIP: Aren’t ALL houses in Portland?

SCENE 32: Ten miniature houses (each about 10 inches high) tumble into Martha’s hands, startling her. Some small figures fall out of the houses. Flip brandishes her claws at a tiny family, running away. MARTHA: ACK! BIT: Now, let’s say you know just the SIZE and PRICE of only ten houses... How could you use that dataset to guess the price of OTHERS?

SCENE 33: Martha, mostly recovered, places tiny house icons onto a simple spreadsheet. A corresponding simple X and Y matrix appears mid panel, plotting price and square footage. A trend-line runs through the 10 dots representing each of the 10 houses. MARTHA: I guess I’d pop ‘em into a spreadsheet, and then plot X and Y coordinates and a trend-line like in high school algebra. BIT: Exactly! Just linear regression. Nothing fancy. FLIP: Now add TEN MORE houses!
SCENE 34: More dots appear as 10 more houses are added to the chart. Martha notices that the line seems a bit off. Bit and Flip look on in happy anticipation. MARTHA: Oh.

SCENE 35: Martha redraws the trend-line to fit the additional data— MARTHA: Lemme just... Adjust that angle a bit...
SCENE 36: —and looks on appreciatively at her results. MARTHA: There. Much better. BIT and FLIP (in unison): AH-HAH!

SCENE 37: Flip pounces onto Martha’s chest, as Bit flies directly towards her. Both are delighted to make their point. Martha is taken aback by their aggressive glee. BIT: LOOK WHAT YOU DID THERE: You used DATA to form a HYPOTHESIS, NEW data exposed ERRORS in your hypothesis, you intuitively MEASURED that error gap, then ADJUSTED your hypothesis to fit! FLIP: Humans CAN learn! It’s a MIRACLE!

SCENE 38: Martha good-naturedly brushes aside the interlocutors chiding them for overreacting. But Bit and Flip are not deterred. MARTHA: Oh, CUT IT OUT, you dorks! I just saw what was wrong and fixed it... Like ANYONE would. BIT: “AnyONE” maybe, but not anyTHING. We machines can’t rely on “intuition” to tell forks from spoons or predict housing costs in the only city with houses! FLIP: Reducing errors in ML is a journey, to be taken one step at a time!
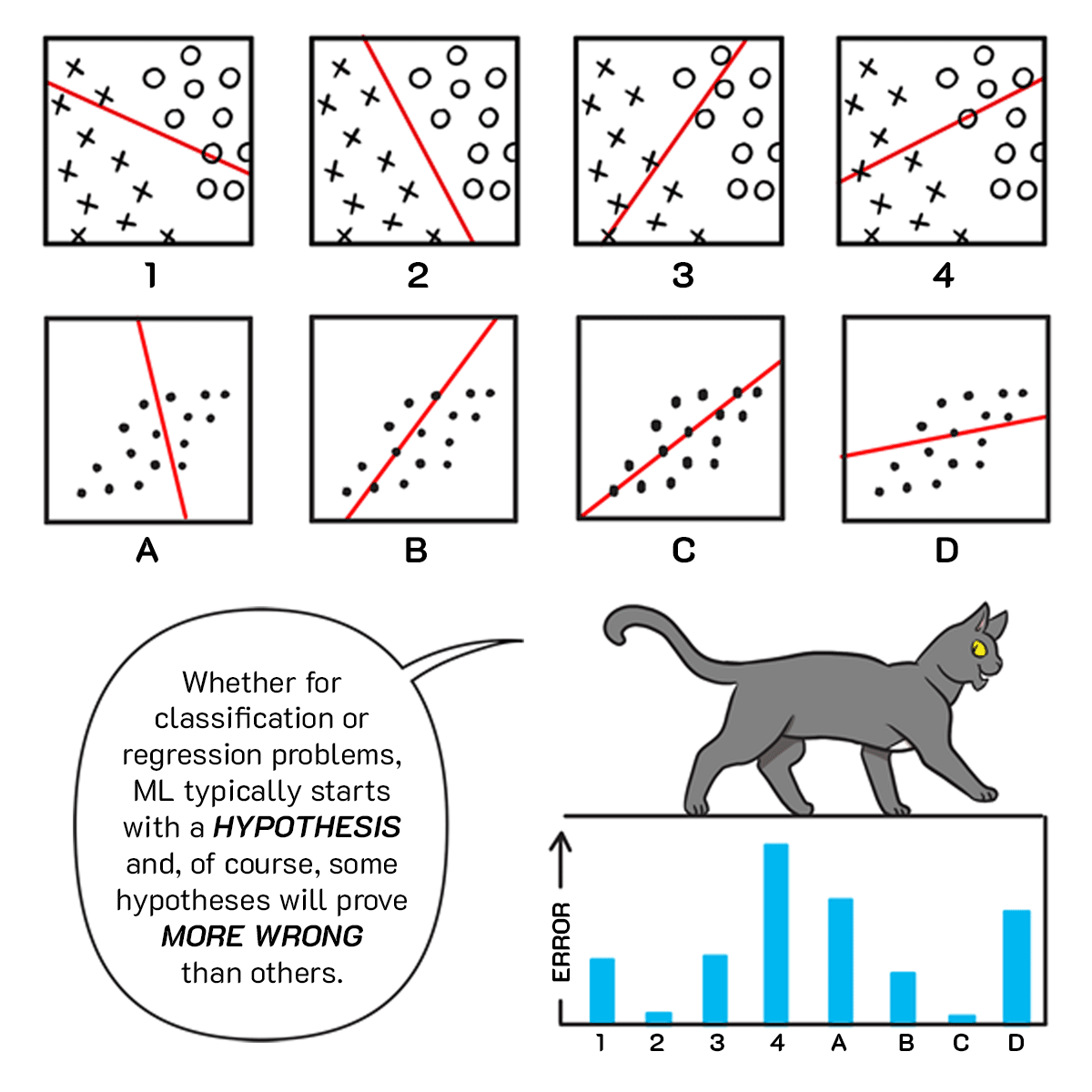
SCENE 39: A series of 8 charts show both trend lines (for regression) and decision boundaries (for classification) in various configurations, and various level s of accuracy. Flip stands astride a simple bar chart showing the ups and downs of their respective levels of error. FLIP: Whether for classification or regression problems, ML typically starts with a HYPOTHESIS and, of course, some hypotheses will prove MORE WRONG than others.
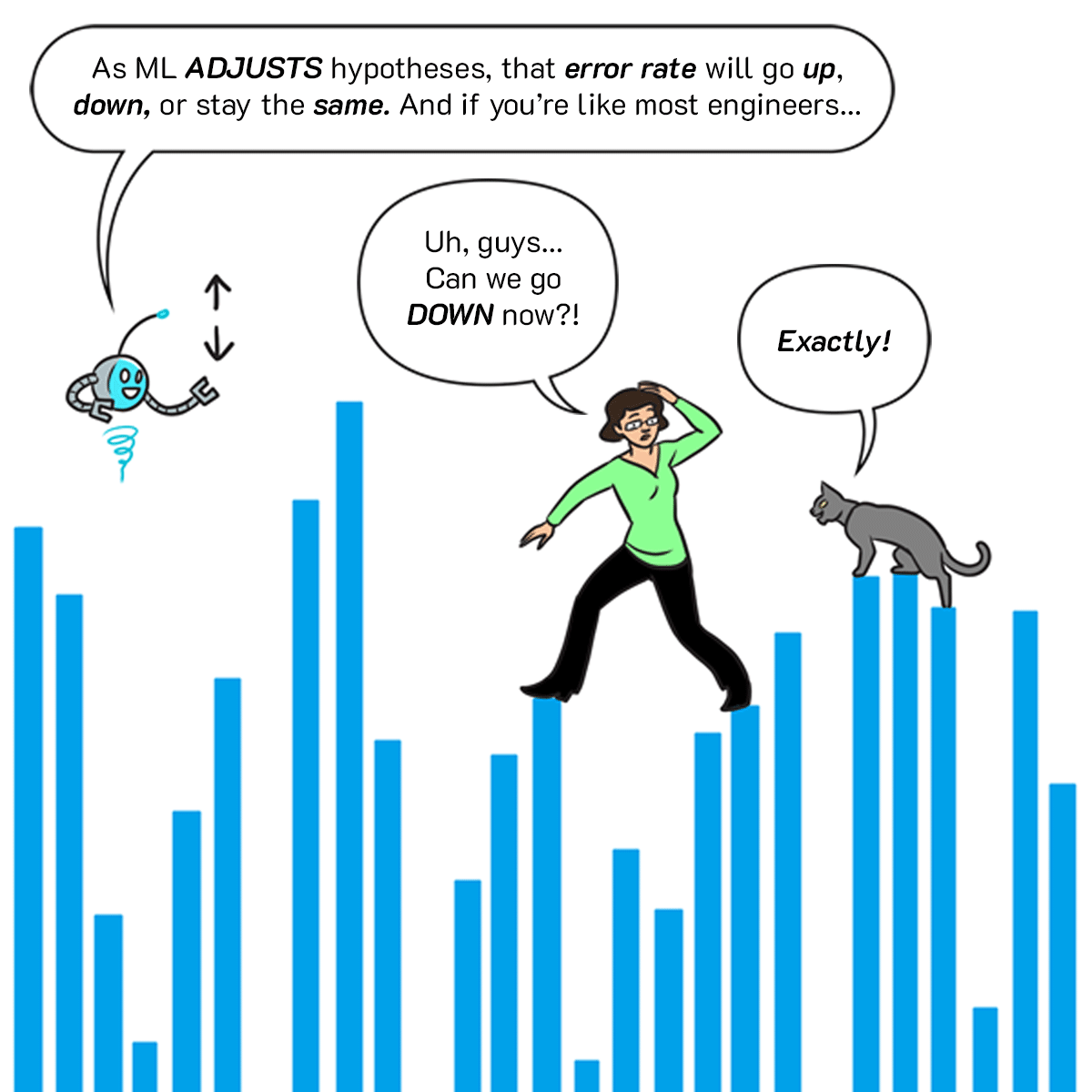
SCENE 40: Martha now stands unsteadily atop a similar—but now gigantic—bar chart forming a perilous landscape of wildly varying error rates (somewhat resembling the skyline of a city). Martha is nervous to be up so high. Bit and Flip continue their explanations as if nothing’s wrong. BIT: As ML ADJUSTS hypotheses, that error rate will go up, down, or stay the same. And if you’re like most engineers... MARTHA: Uh, guys... Can we go DOWN now?! FLIP: Exactly!
SCENE 41: The bars all disappear from view but Martha still stands there, panicking at the fact that she can no longer see a way to get down. BIT: You want to get “DOWN” to where the model's error rate is at its LOWEST, so that you— MARTHA: NO. NO. I mean I LITERALLY want to climb down to— AH! Why can’t I SEE anything anymore?!

SCENE 42: Bit and Flip mischievously continue talking. BIT: heh FLIP: You didn’t think we’d make it that easy, did’ja?
SCENE 43: Middle-ground shot of Martha kneeling. A short dotted line begins to appear underneath her as Flip begins walking left to right at a slight downward angle. Bit gestures at the invisible-but-still-present landscape all around them. MARTHA: But that error landscape... Where did it all go?? BIT: oh, it still here... all around us! FLIP: But the SHAPE of that landscape...
SCENE 44: The dotted line extends slightly downward from left to right, as Flip start slowly walking. FLIP: ...that array of peaks and valleys we call an “error function” or “loss function”... ...can only be revealed—
SCENE 45: Flip walks further, extending the dotted line to more clearly show a downward slope. Martha’s eyes follow Flip as Bit looks on. FLIP: —by gradually descending through it! It’s a journey we call GRADIENT DESCENT.
SCENE 46: Bit excitedly places a mechanical carpenter’s level upon the dotted line to measure its angle of descent. Martha pulls out her phone. BIT: At every point, the model gauges the angle of steepest descent, much like this elegant antique “spirit level” used by four centuries of carpenters to— MARTHA: Oh, hey! My phone has an APP that does that!
SCENE 47: Bit’s mood sags, as his beloved “spirit level” is supplanted by Martha’s app. Martha exits panel right to follow Flip down the slope. BIT (last two words a bit set apart and slightly smaller): —or, okay... that works too... an “app”... MARTHA: Wait for me!
SCENE 48: Flip stands at what appears to be the bottom of this dotted line Valley. Martha gingerly follows him, gripping the sides of the dotted line. Bit—arms drooping—floats behind her. MARTHA: So gradient descent is kinda like hiking down the SLOPES OF WRONG into the VALLEY OF RIGHT? FLIP: Yup! Or at least into the “Valley of Right Enough.” Machine learning is part data science and statistics; there’s a strong probabilistic streak to it.

SCENE 49: Flip, reclining, looks on from the top half of the panel. In the bottom half of the panel is a simple animated diagram showing a ball descending to a valley (a la gradient descent) and in perfect synchronization, a trendline finding its most accurate position. This is labeled “REGRESSION”. Following that brief sequence, the two panels flip over to reveal two new animated panels along the same lines, but now with a decision boundary on the right, labeled “CLASSIFICATION.” The animation is looped, going back and forth between the two FLIP: Think descending = solving, plain and simple. Gradient descent is the learnin g process, enacted in space.
SCENE 50: Long-shot of Martha and Flip, having reached what they thought was the bottom. Bit, who’s extended the dotted line further, is showing them that they can go lower still. FLIP: Machine learning is a young field. We’re all learning as we go, and there are plenty of ongoing challenges... ...like not getting trapped into a false bottom, AKA “local minima,” during descent. BIT: Heads-up!
SCENE 51: The three confer... BIT: ML is a moving target. The tools and techniques that seem entrenched today, might look very different in the next wave. FLIP: So true, buddy! For example, we’ll always want to minimize error, but gradient descent may not always be our method of choice. There are other “optimizers” as we call them. MARTHA: Hmm. Speaking of which...

SCENE 52: Martha has now returned to her simple 20-house linear regression chart. She’s gesturing toward it. MARTHA: Sorry to bring us crashing back to earth, but do I seriously need some freaky, calculus-filled energy landscape just to price TWENTY DUMB HOUSES WITH ONE FEATURE EACH? BIT: Nah. FLIP: No way!
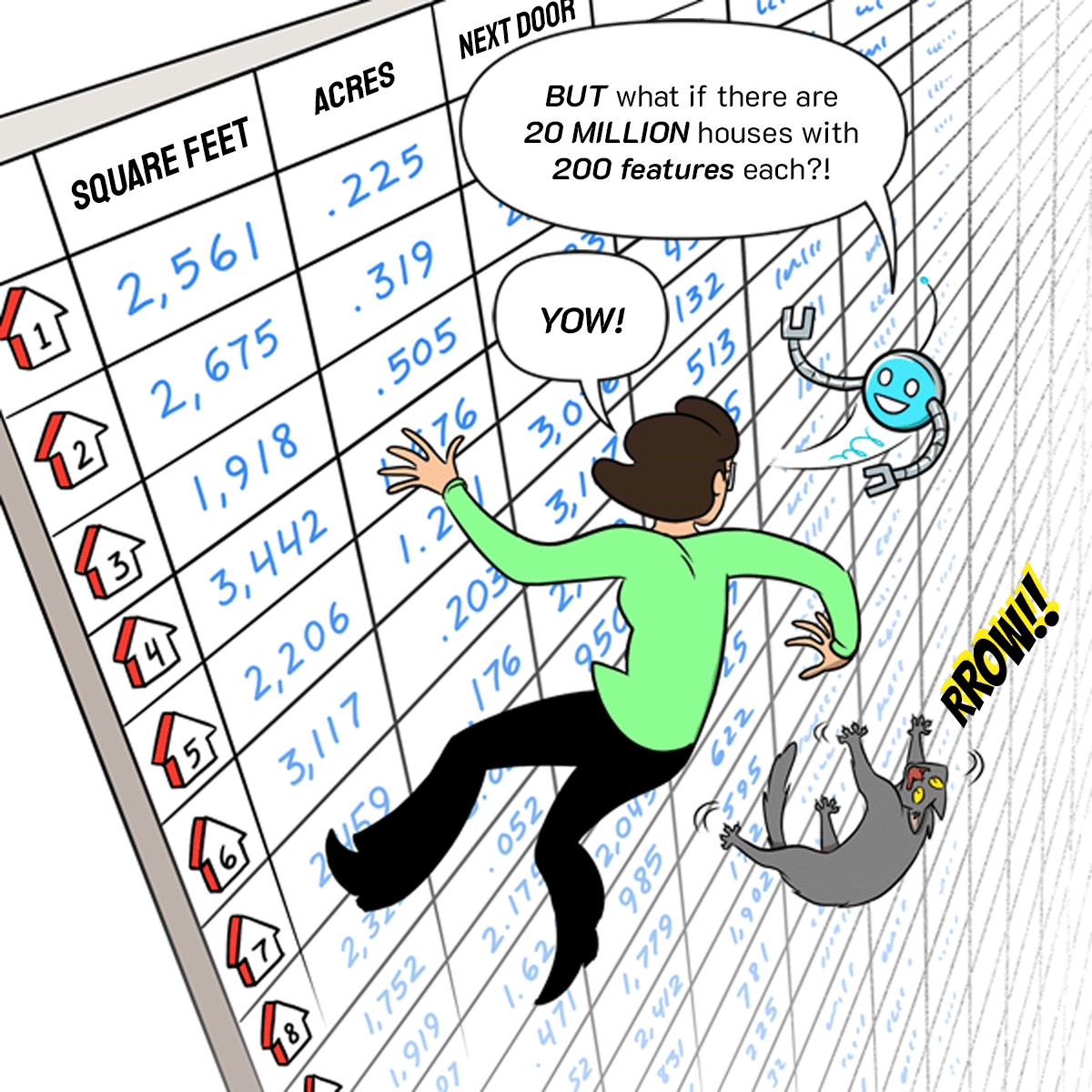
SCENE 53: Suddenly, all three are floating in front of a seemingly infinite giant spreadsheet. BIT: BUT what if there are 20 MILLION houses with 200 features each?! MARTHA: YOW! FLIP (sound f/x style): RROW!!
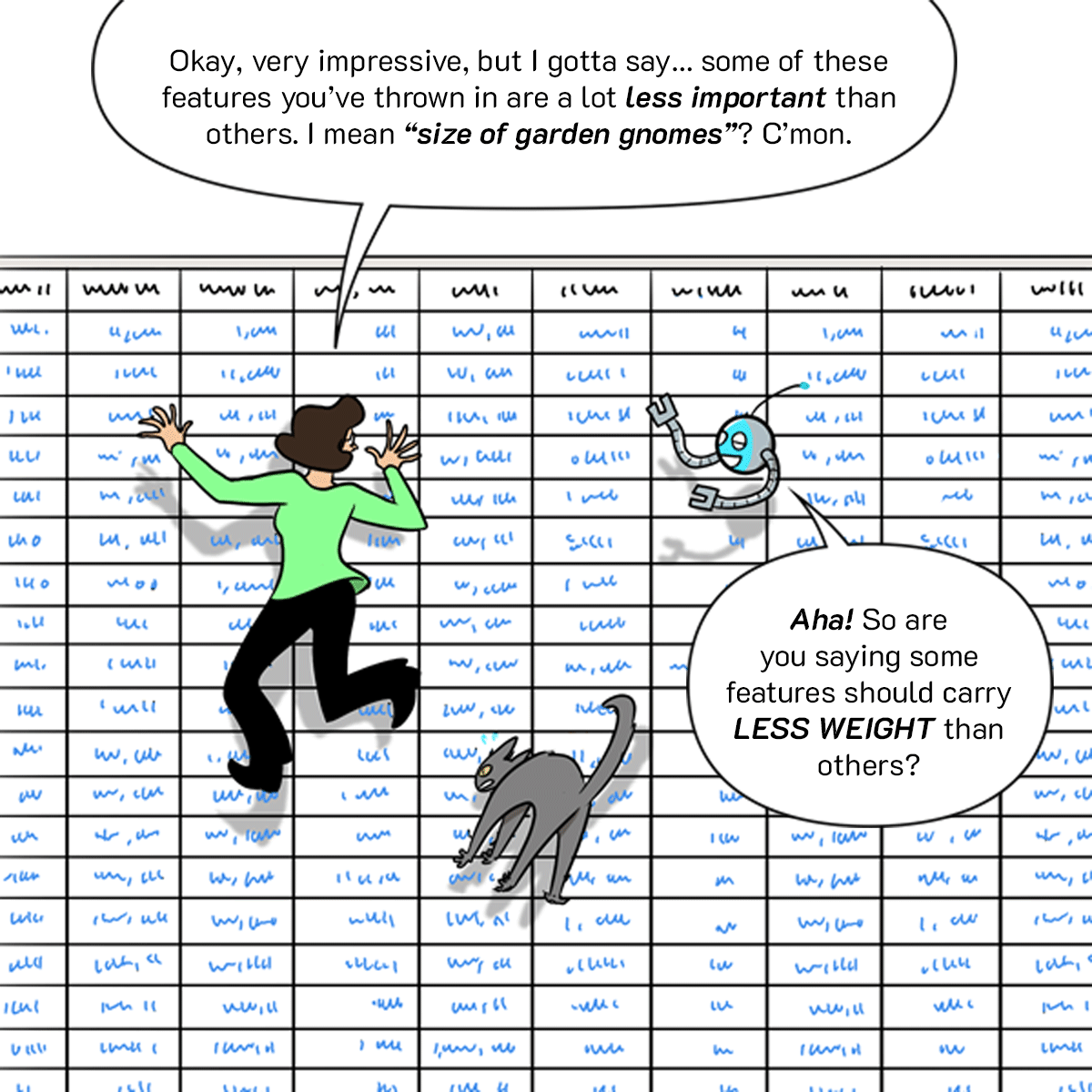
SCENE 54: Martha examines the spreadsheet. Flip clings to Martha’s blouse. MARTHA: Okay, very impressive, but I gotta say... Some of these features you’ve thrown in are a lot less important than others. I mean “size of garden gnomes”? C’mon. BIT: Aha! So are you saying some features should carry LESS WEIGHT than others?
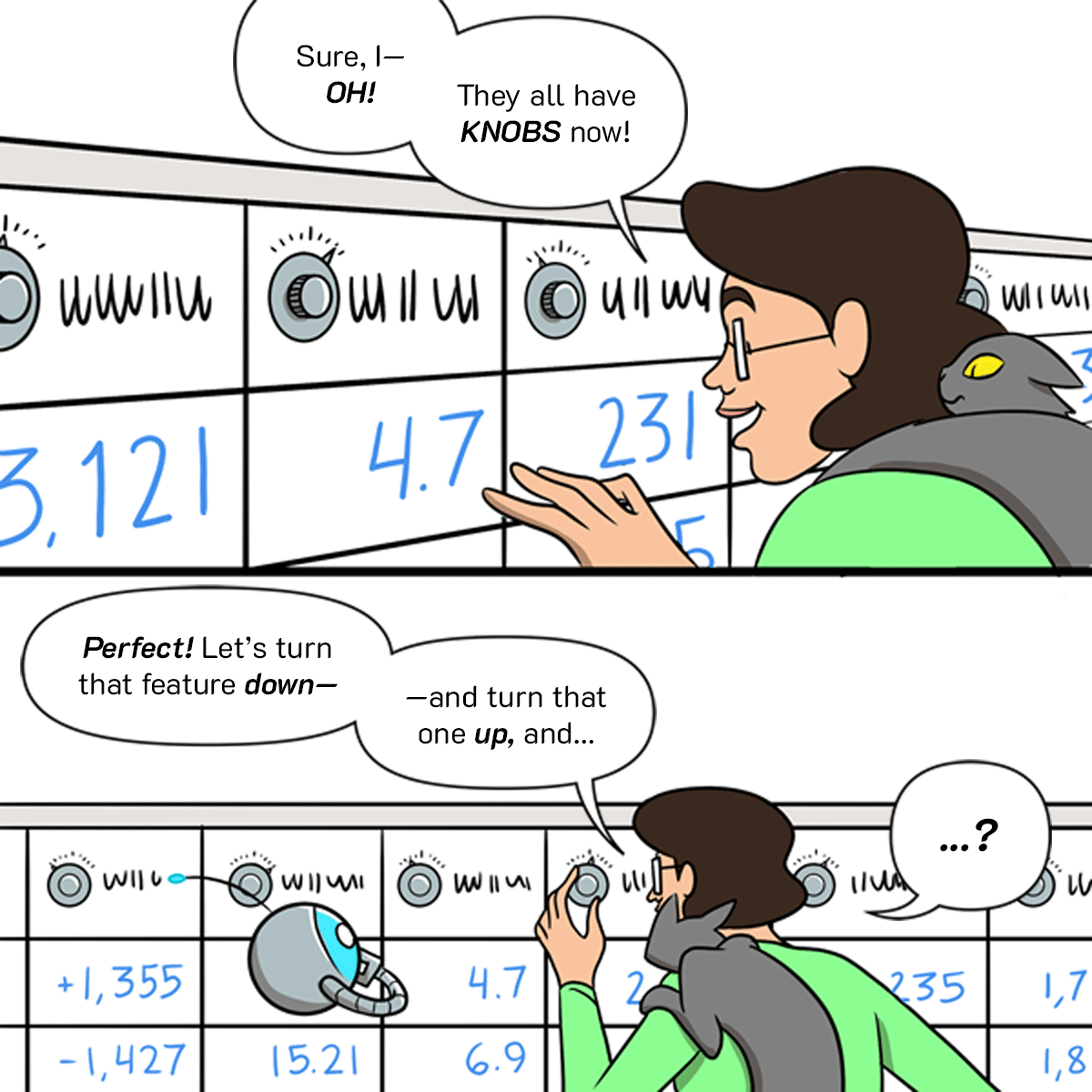
SCENE 55: Knobs appear next to each feature. Martha is delighted and starts to fiddle with them. Flip looks on from Martha’s shoulder as Bit floats nearby. MARTHA: Sure, I—OH! They all have KNOBS now! Perfect! Let’s turn that feature down— —and turning that one up, and... ?
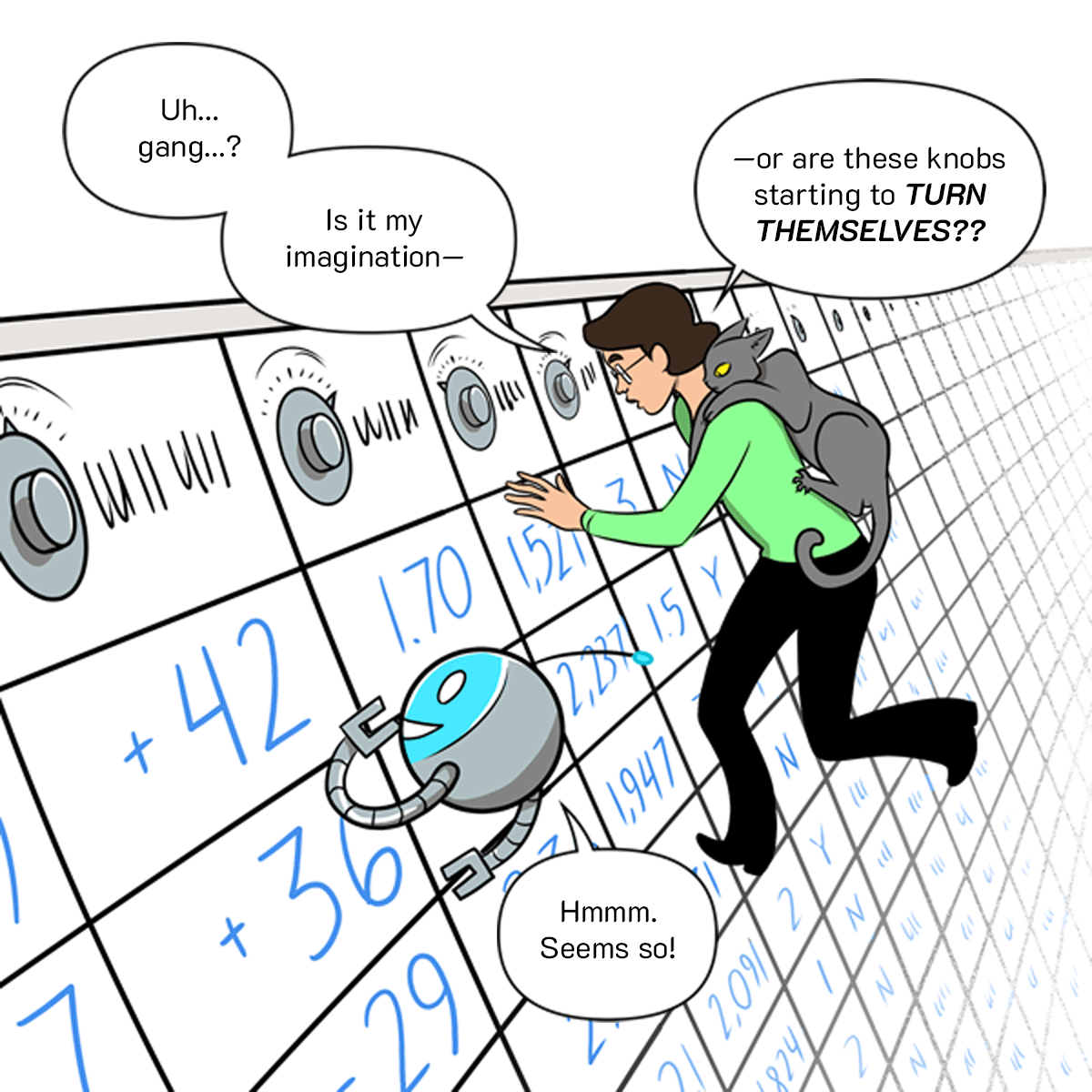
SCENE 56: Martha pulls back, apprehensive, as the knobs begin to turn themselves. Bit is unfazed. MARTHA: Uh... guys...? Is it my imagination— —or are these knobs starting to TURN THEMSELVES?? BIT: Hmmm. Seems so!
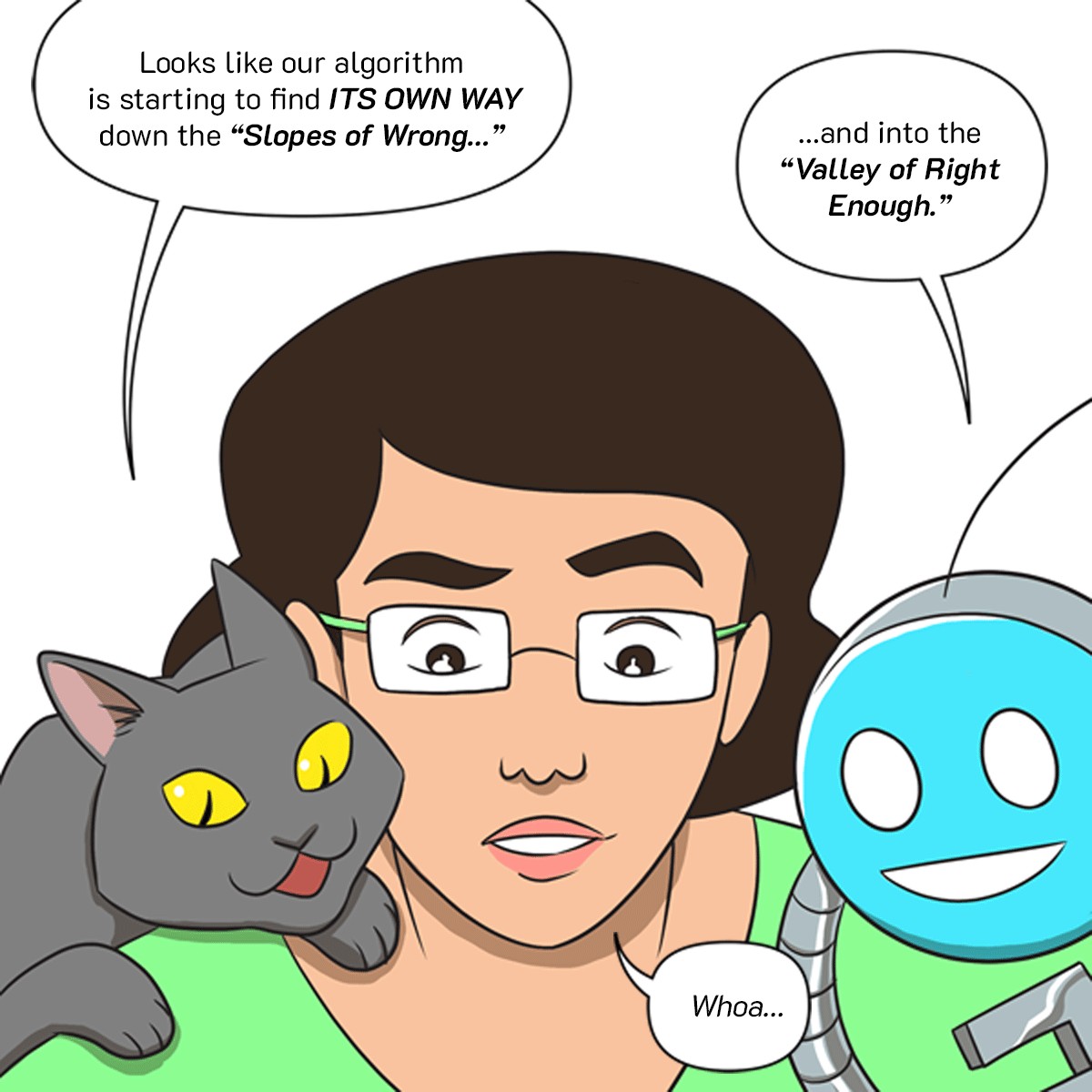
SCENE 57: Martha, close-up, looks on in awe. The interlocutors, by her side, look on with mischievous satisfaction. FLIP: Looks like our algorithm is starting to find ITS OWN WAY down the “Slopes of Wrong...” BIT: ...and into the “Valley of Right Enough.” MARTHA: Whoah...
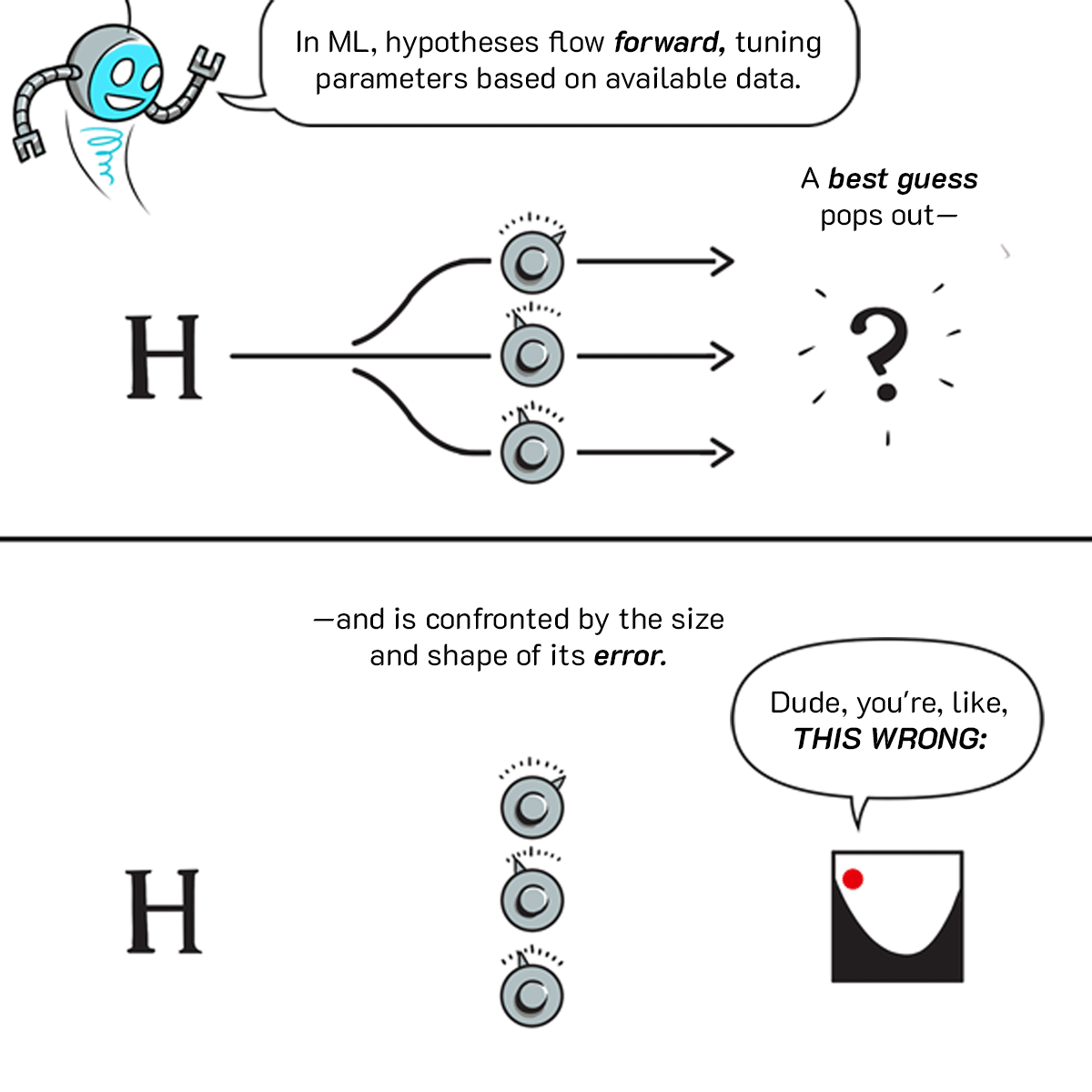
SCENE 58: Top half of panel: Diagram of hypothesis (H) at left, arrows flowing forward toward a question mark at right. Dials representing parameters accompany the arrows. Bottom half of panel: Arrows gone, the question mark is now a gradient descent symbol. BIT: In ML, hypotheses flow forward, tuning parameters based on available data. A best guess pops out— —and is confronted by the size and shape of its error. WORD BALLOON FROM GD SYMBOL: Dude, you're like THIS WRONG.
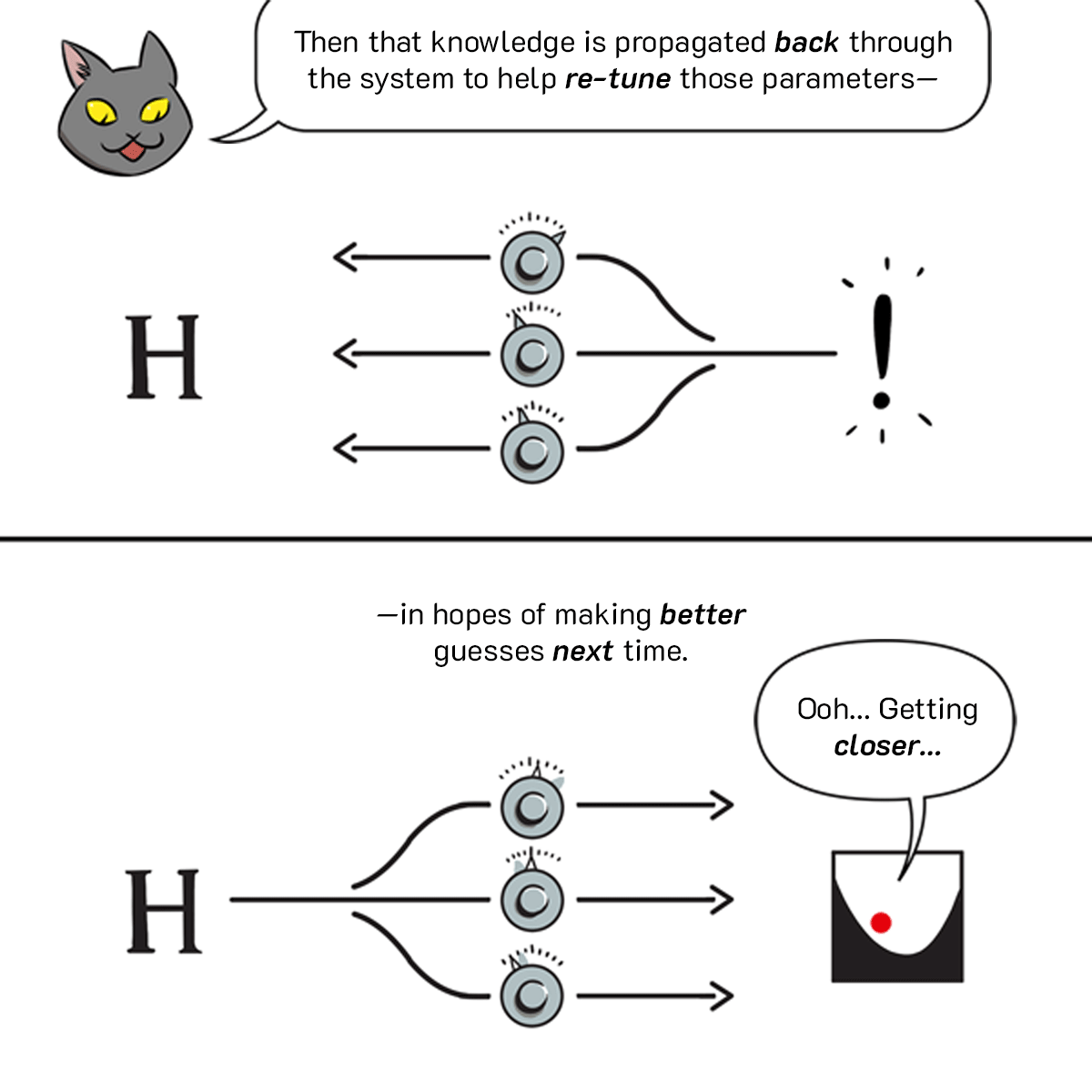
SCENE 59: Top half of panel: Arrows return back, right to left, retuning the dials. Bottom half of panel: New forward arrows with the new settings, left to right again. Gradient descent symbol indicates progress (i.e. going down the slope). FLIP: Then that knowledge is propagated back through the system to help re-tune those parameters— —in hopes of making better guesses next time. WORD BALLOON FROM SYMBOL: Ooh... Getting closer...

SCENE 60: Top half of panel: Simplified representation of the back-and-forth flow. The H on left, the GD symbol on right, and simple dials in the middle. Bottom half of panel: Same as before but with only the return arrow (Flip walks on it, right to left). BIT: That iterative back-and-forth is the rhythm of most machine learning. FLIP: The “learning” part is that backflow re-tuning—known as BACKPROPAGATION here in the era of neural networks.
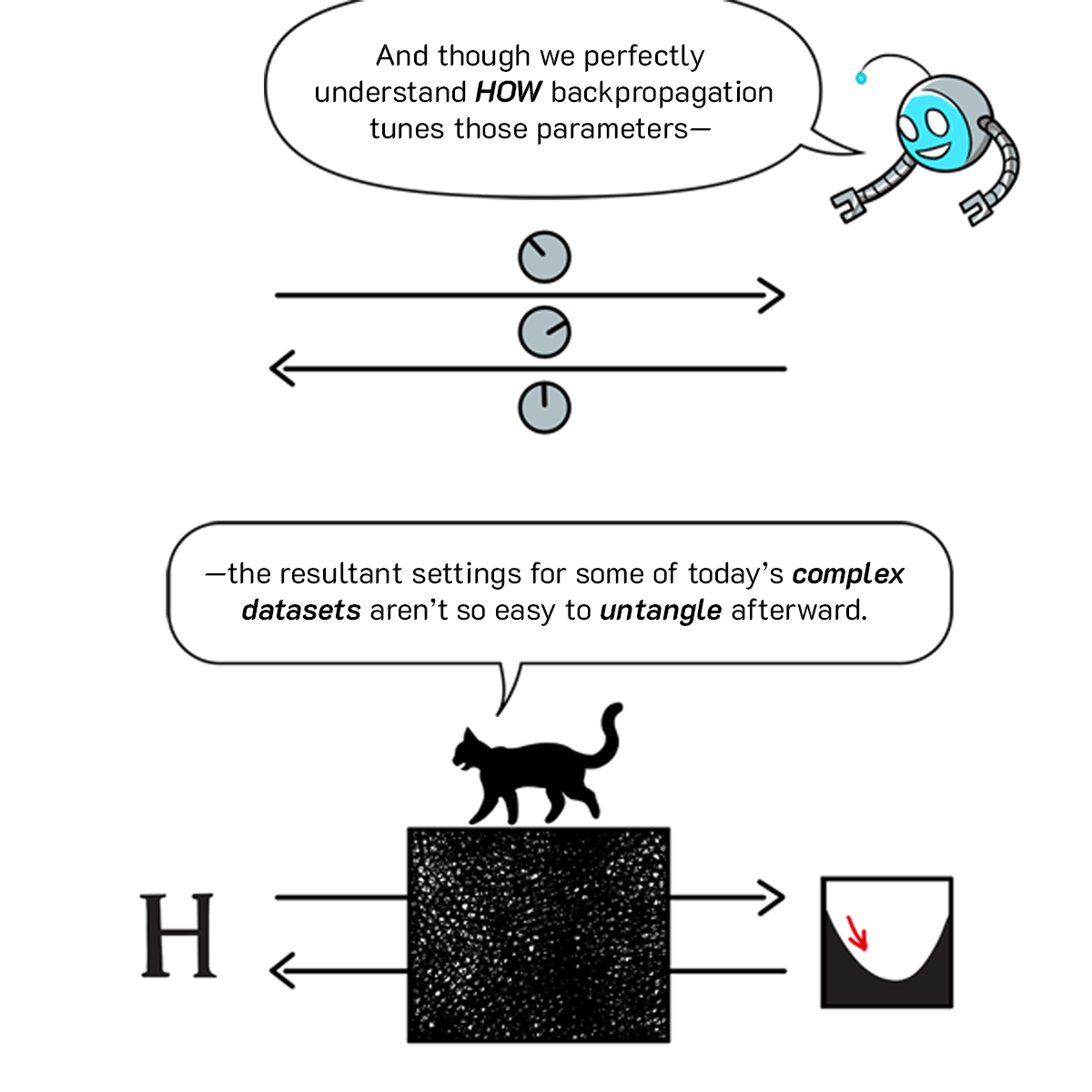
SCENE 61: Top half: Just the return arrow and the dials. Bottom half: The simplified diagram (from the top of panel 60) but with the dials covered up by a literal “black box.” BIT: And though we perfectly understand HOW backpropagation tunes those parameters— FLIP: —the resultant settings for some of today’s complex datasets aren’t so easy to untangle afterward.

SCENE 62: Martha cheerfully points to the side of her head; Bit and Flip respond. MARTHA: Fair enough, I guess... I can barely untangle what’s going on in THIS machine half the time. BIT: Hey, at least something is going on in there. FLIP: Yeah, that’s more than we can say for SOME humans at your company. MARTHA: Aww, thanks!

SCENE 63: Long shot of the three. Martha holds a labeled small house in her right hand under a linear regression chart, and a labeled fork in her left hand under a classification chart. MARTHA: So, is machine learning mostly classification and regression like in our fork and house examples? BIT: Yes and no. Those are useful ingredients in many machine learning recipes... FLIP: But at the end of the day, it’s your choice of LEARNING METHOD that counts the most.

SCENE 64: The three ponder the three categories of learning style; a name and symbol for each. BIT: And these days, there are three methods most commonly used in machine learning tasks. FLIP: Which you choose depends on what you want out of your data.
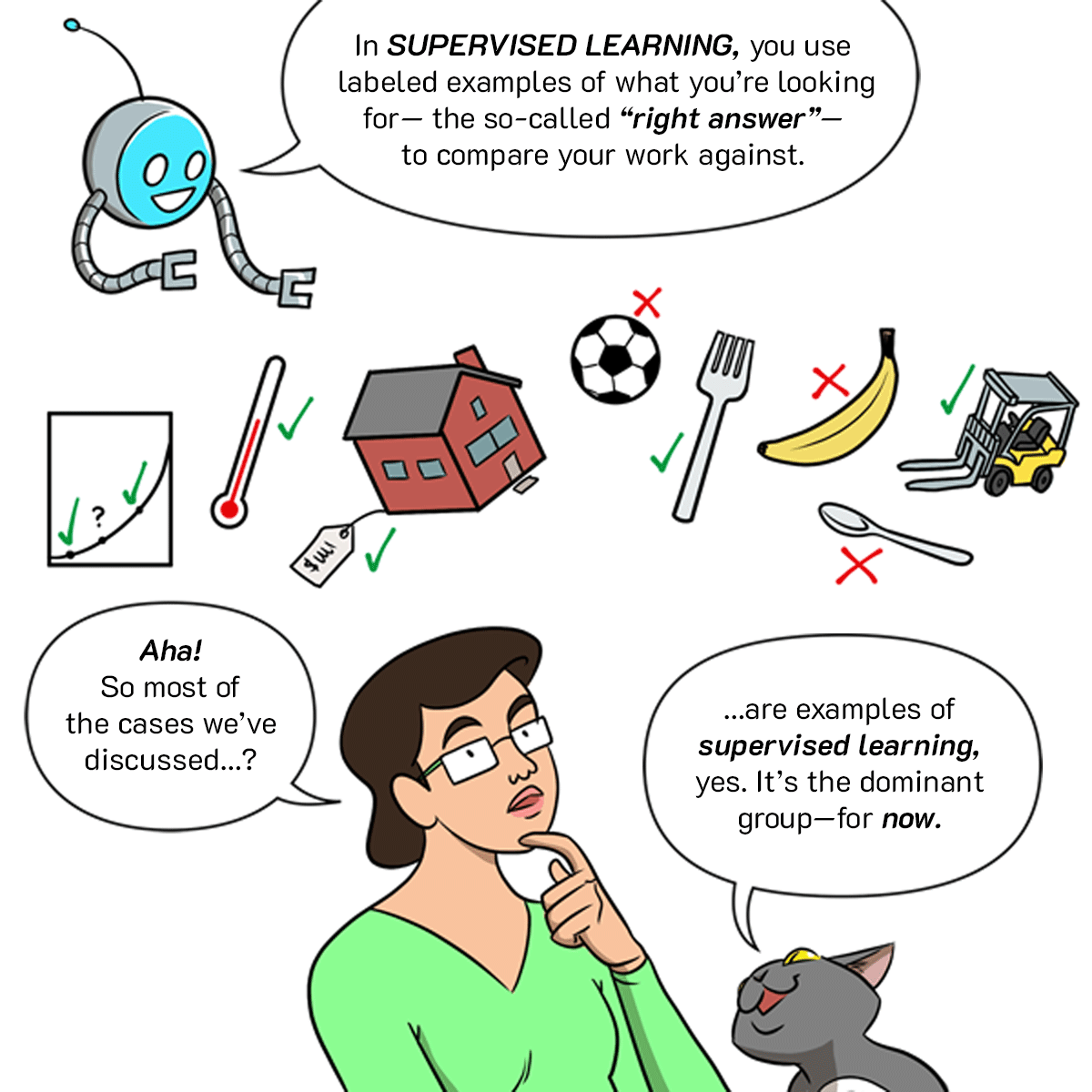
SCENE 65: Bit gestures to a series of objects floating in mid-panel: a thermometer, house, a baseball, fork, a banana, a spoon, a forklift... Each with either an X or a check mark next to it. Martha and Flip look on. BIT: In SUPERVISED LEARNING, you use labeled examples of what you’re looking for— the so-called “right answer”—to compare your work against. MARTHA: Aha! So most of the cases we’ve discussed...? FLIP: ...are examples of supervised learning, yes. It’s the dominant group—for now.
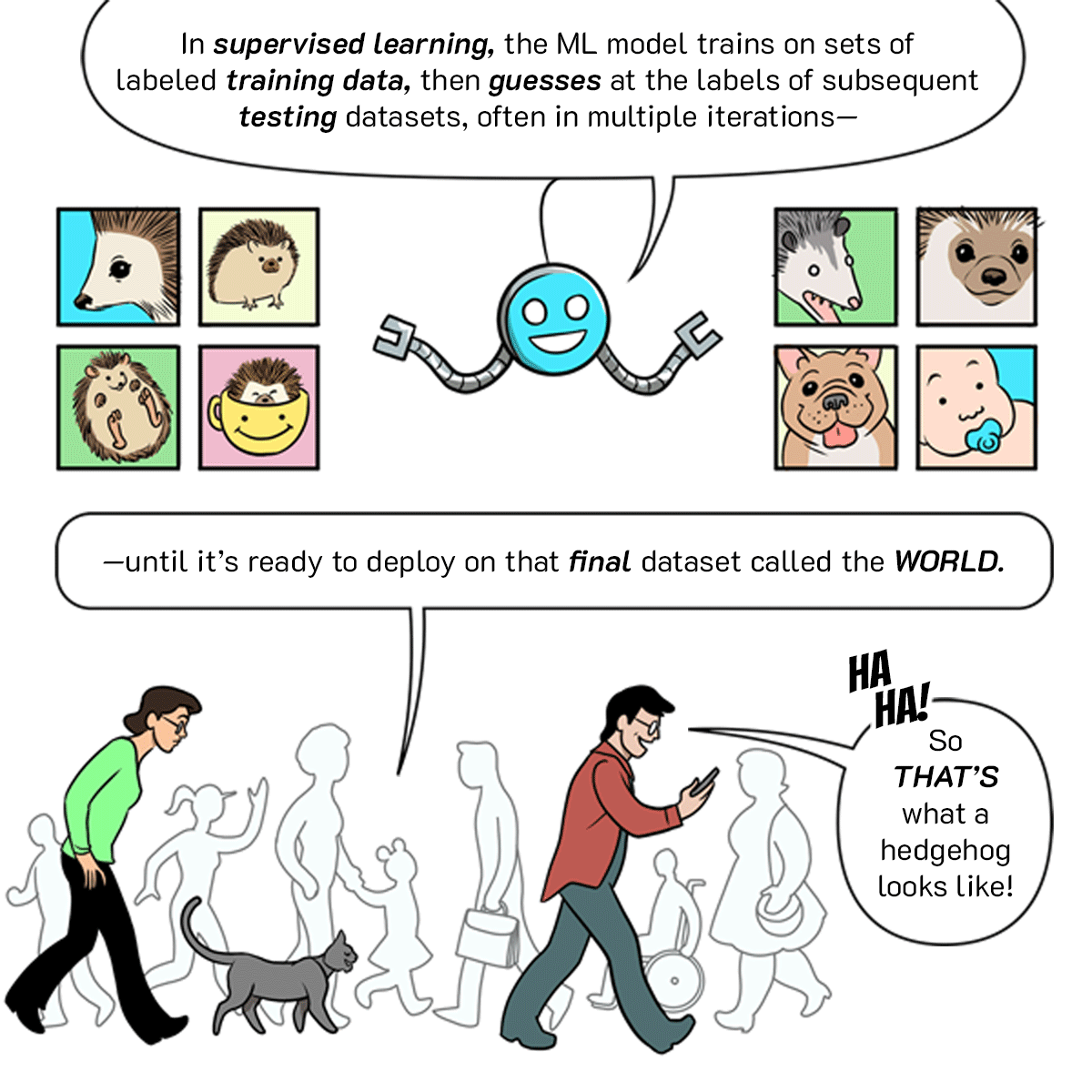
SCENE 66: Top half: Bit gestures with one hand to four pictures of hedgehogs, and with the other hand to four pictures that are not hedgehogs. Bottom half: Martha and Flip walk behind a pedestrian looking up pictures of hedgehogs on his phone and laughing. BIT: In supervised learning, the ML model trains on sets of labeled training data, then guesses at the labels of subsequent testing datasets, often in multiple iterations— FLIP: —until it’s ready to deploy on that final dataset called the WORLD. PEDESTRIAN ON PHONE: HA! HA! So, THAT’S what a hedgehog looks like!
SCENE 67: Long shot of the three gazing out a big mosaic background of movie images with cats in them. MARTHA: In UNSUPERVISED there’s no “right” answer per se. You’re on the lookout for clusters or anomalies that may turn out to be meaningful. Such as people who like the same type of movies. MARTHA AND FLIP (partially in unison): OMG I love that one! Have you seen that one though? SO GOOD!
SCENE 68: Bit airlifts Martha and Flip out of a giant crowd with even more movies from all around the world. BIT: ML is a great fit for this kind of work because it can take on a huge— —or hugely complex, dataset. VOICES FROM CROWD: OMG I love that one!

SCENE 69: A pixelated vintage arcade-style Bit zips around a maze-like game. BIT: And in REINFORCEMENT LEARNING— —the program tries to find the most efficient pathway to its goal. Successful routes get a reward. Failures, a restart.
SCENE 70: Bit emerges from the maze. Martha holds a #1 trophy as Flip looks on. BIT: Yay! FLIP: One deep reinforcement learning system was so good at classic arcade games, it could switch to a game it hadn’t played before— —and learn to win with no additional programming. MARTHA: Whoa, that’s bananas!
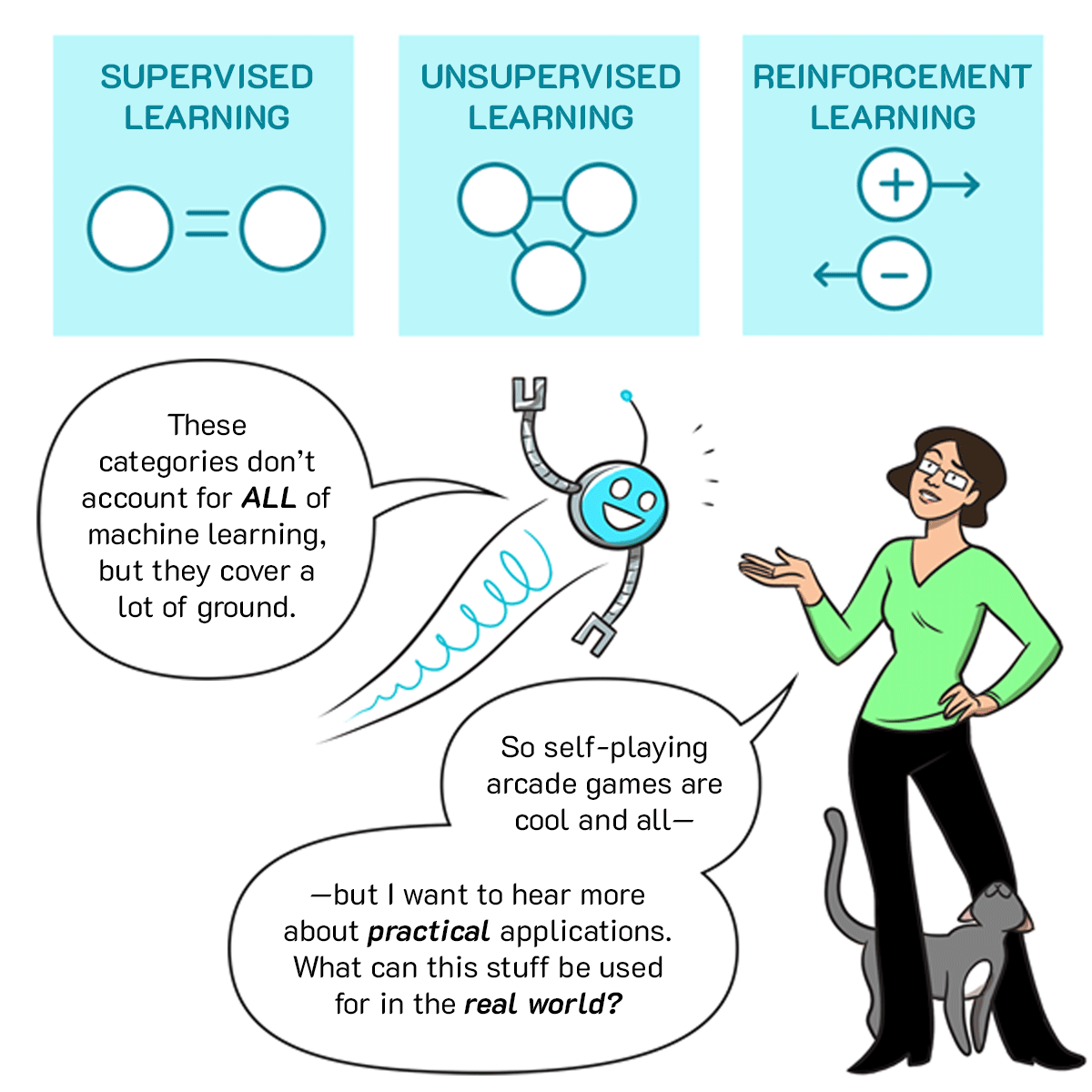
SCENE 71: Our trio return to the 3 learning category symbols to discuss further. BIT: These categories don’t account for ALL of machine learning, but they cover a lot of ground. MARTHA: So self-playing arcade games are cool and all— —but I want to hear more about practical applications. What can this stuff be used for in the real world?

SCENE 72: Sample images of sound waves, alerts, brain scans, charts, etc.... FLIP (via BALLOONS AND ARROWS): Supervised learning is used in image classification— —speech and text recognition— —medical diagnostics— —and fraud detection, to name a few...
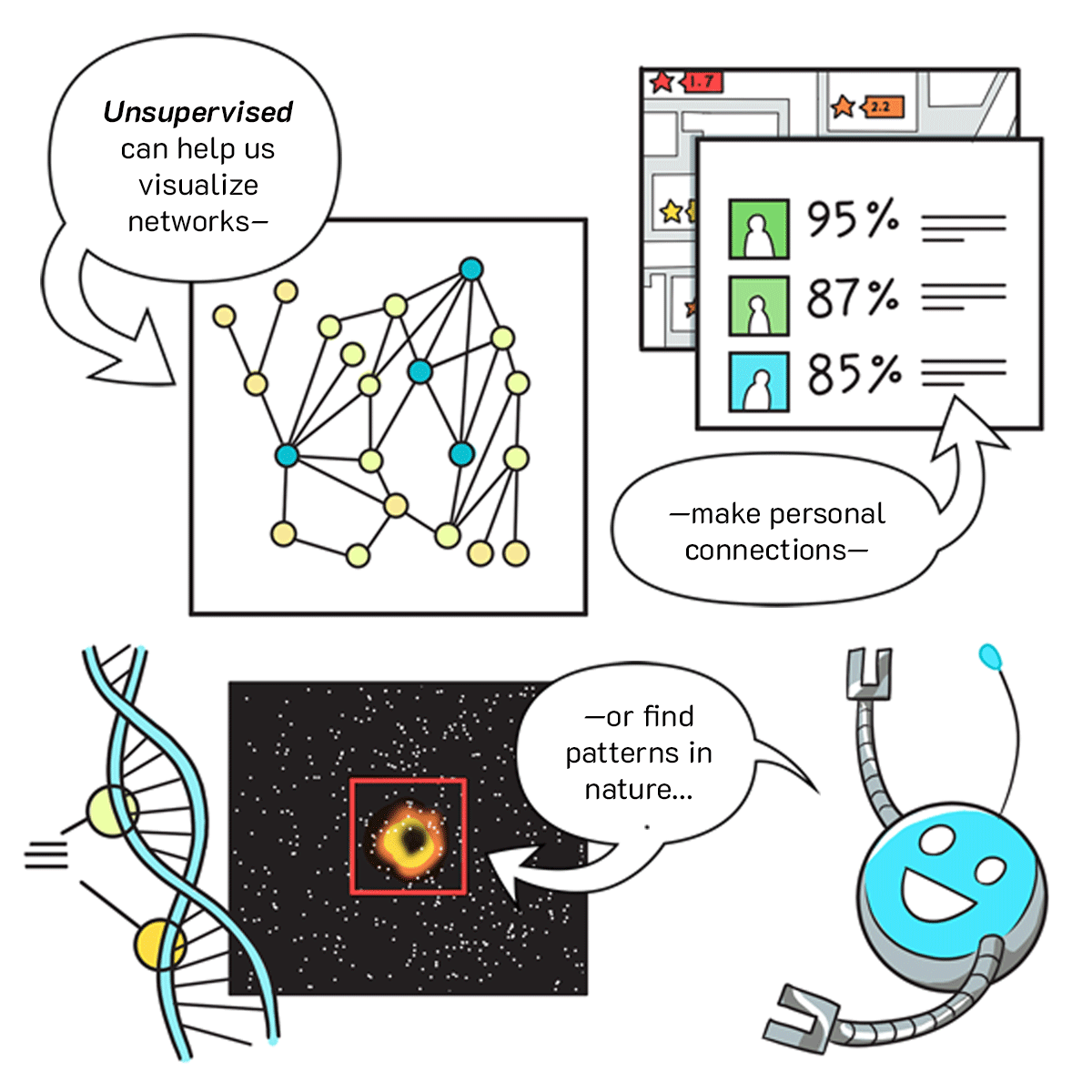
SCENE 73: Sample images of network maps, personal profiles, DNA representations, blackhole shadows, etc.... BIT (via BALLOONS AND ARROWS): Unsupervised can help us visualize networks —make personal connections— —or find patterns in nature...
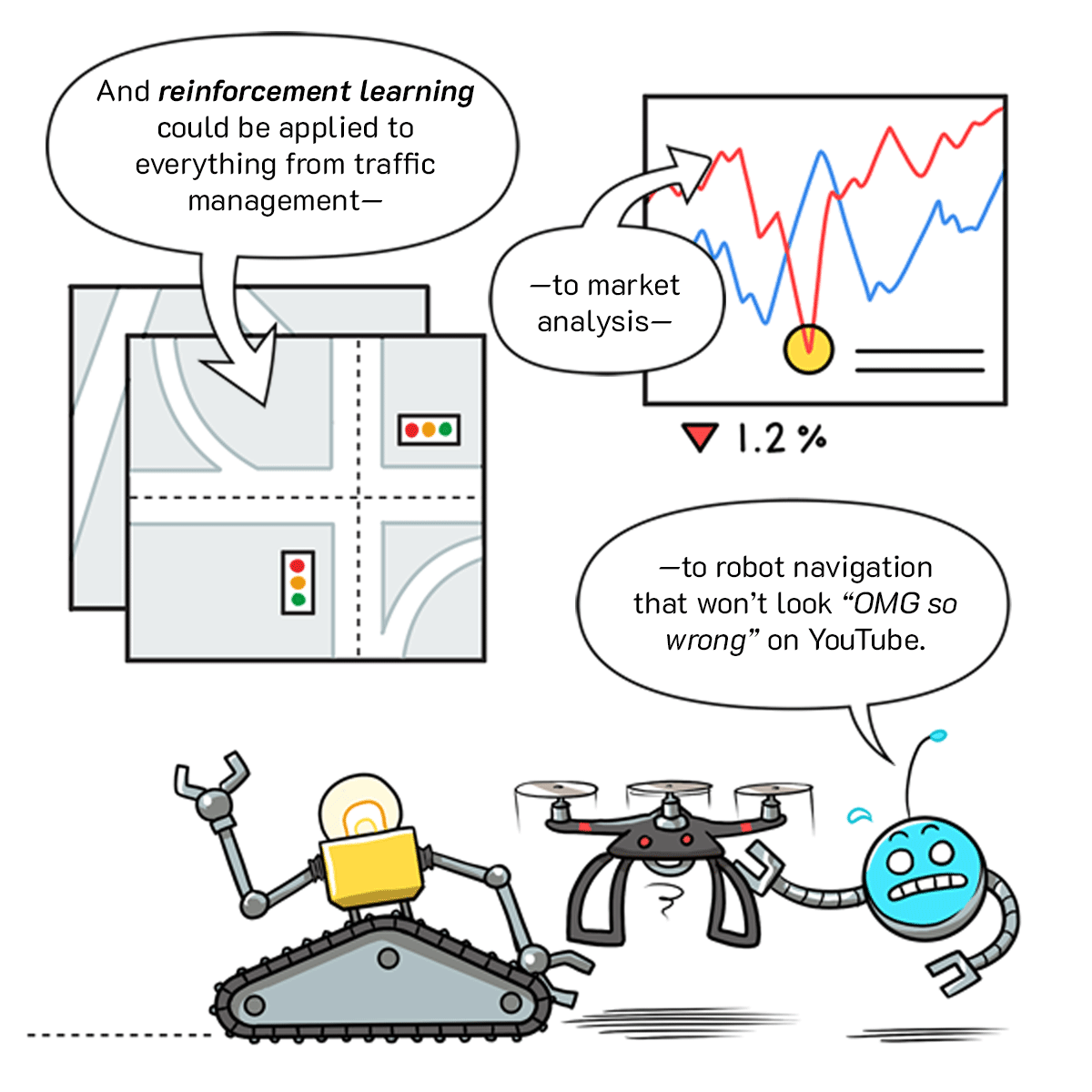
SCENE 74: Sample images of route maps, stock charts, robots, etc.... BIT (via BALLOONS AND ARROWS): And reinforcement learning could be applied to everything from traffic management— —to market analysis— —to robot navigation that won’t look “OMG so wrong” on YouTube.

SCENE 75: Flip, on Martha’s shoulder, explaining. FLIP: But no matter the kind of ML, GOOD DATA is where it all begins. Say you’re using supervised learning to identify photos of, oh, I dunno... ...CATS! First you have to gather data that contain the information you’re looking for.

SCENE 76: Same, but with images of cats in the background. MARTHA: So, I’d need to think about... dimensions, resolution, aspect ratio... Close-ups versus long shots... From what angles? Isolated or in and environment? Are kittens included? Tigers? FLIP: Exactly. You need images that encapsulate the essentials “felinity.”
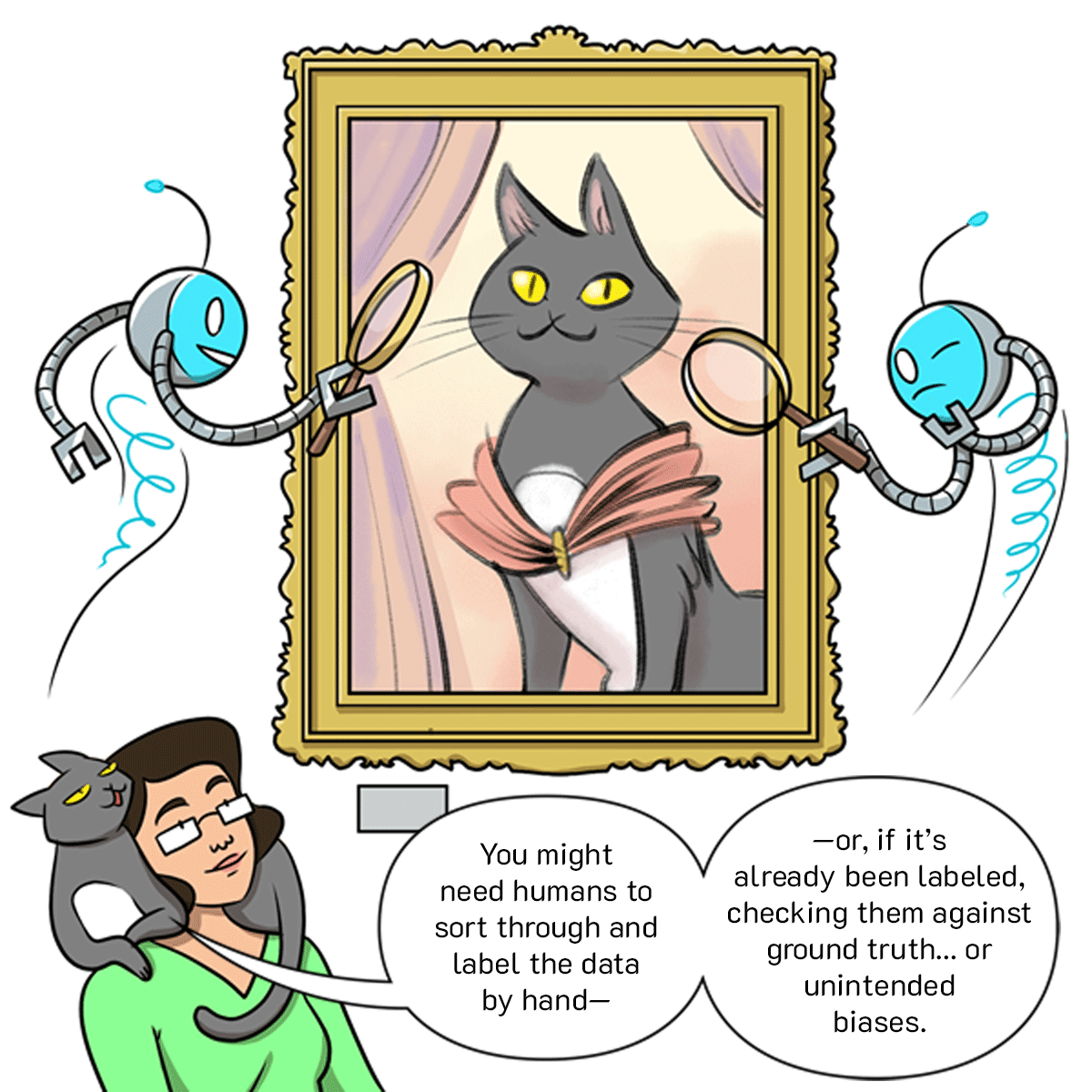
SCENE 77: Two instances of Bit examine a painting of Flip using magnifying glasses. Martha and Flip look on. FLIP: You might need humans to sort through and label the data by hand— —or, if it’s already been labeled, checking them against ground truth... or unintended biases.
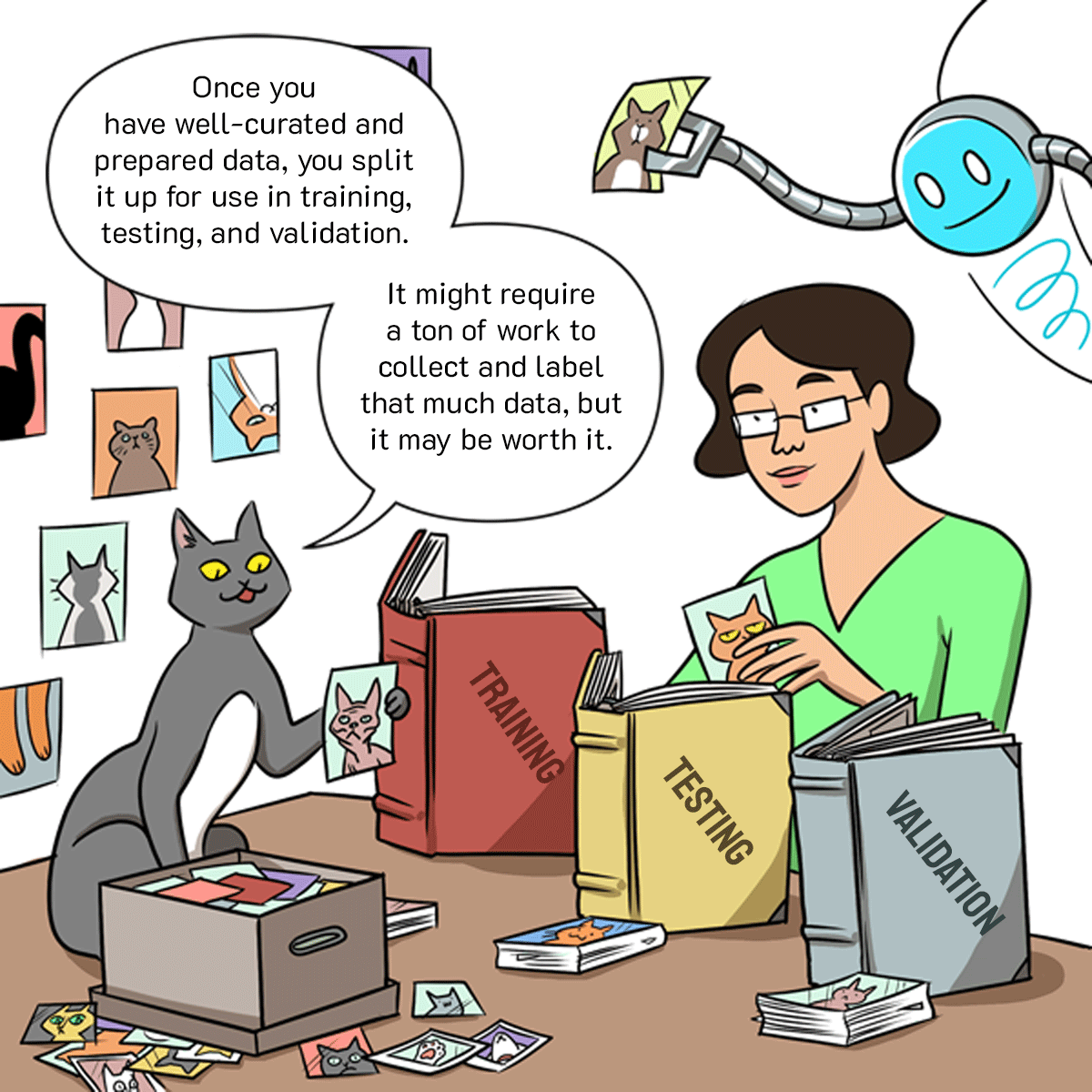
SCENE 78: Martha examines stacks of cards being provided by Flip and Bit, While assembling three thick binders of data. FLIP: Once you have well-curated and prepared data, you split it up for use in training, testing, and validation. It might require a ton of work to collect and label that much data, but it may be worth it. CAPTION (arrow to validation data): More in Part Two.

SCENE 79: Long shot of Martha and Flip looking at for erroneously labeled images: Flip next to a place setting marked “fork.” A fork next to a ball of yarn marked “cat.” Bit marked “grapefruit.” Magritte’s pipe marked “pipe.” LABELS: FORK CAT GRAPEFRUIT PIPE FLIP: If your data is too sloppy, homogenous, or scarce, your results could fall apart in the real world...
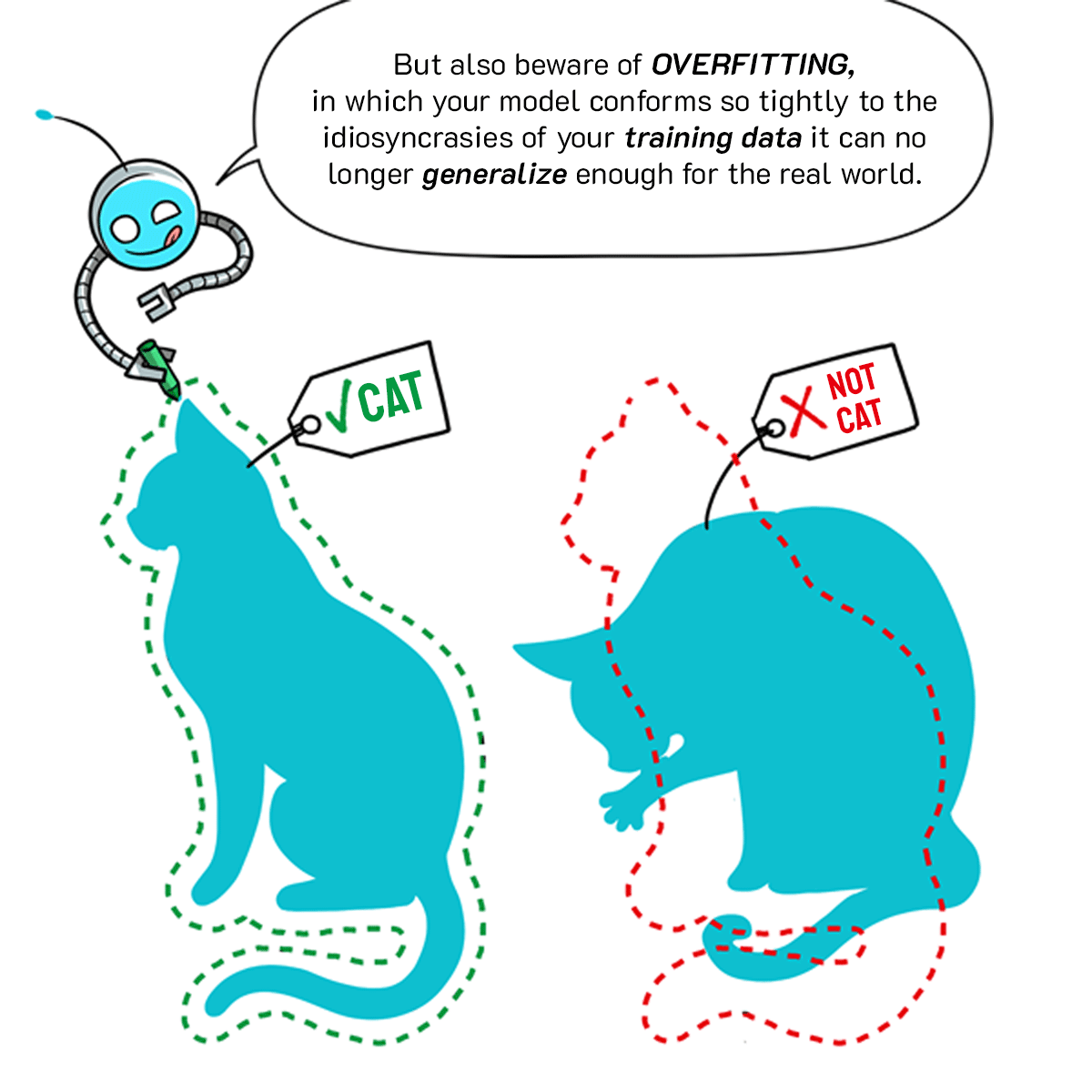
SCENE 80: A green dotted line perfectly outlines the silhouette of the sitting cat; it’s marked “√ CAT.” A red dotted line, identical to the previous one, contradicts the silhouette of a cat clearly licking its paws; it’s marked “√ NOT CAT.” BIT: But also beware of OVERFITTING, in which your model conforms so tightly to the idiosyncrasies of your training data it can no longer generalize enough for the real world.

SCENE 81: Bit holds a platter of miscellaneous objects, talking to no one in particular. Flip turns her head, noticing that Martha is gone. BIT: But so long as you have the right data, and enough of it, you can— FLIP: Hold on! Where did she go?
SCENE 82: Flip and Bit hurry to catch up with Martha who’s already heading up a flight of stairs leading up to a door suspended in thin air. On the door is a small symbol, reminiscent of a brain seen from above, with network markings. MARTHA: Oooohh... Does that door lead to what I THINK it leads to? FLIP: Human, wait! Be careful up there.

SCENE 83: The interlocutors catch up to Martha who’s gesturing towards the door. MARTHA: C’mon, we all know where this is heading. It’s machine learning’s biggest sensation nowadays: neural networks! BIT: Yes, it’s true. And yes, a lot of the examples we gave can only be done with neural nets... FLIP: But taking them on is a big step!
SCENE 84: They urge her to slow down as Martha tries to open the door, finding it locked. BIT: Artificial neural networks are powerful tools, but they can eat up time and money. MARTHA: Grr. It’s locked. FLIP: Depending on the task, you might not NEED one! SOUND F/X: RATTLE RATTLE
SCENE 85: Flip and Bit, seen from Martha’s POV, urging her to consider other options. Behind Flip is an envelope with arrows emanating from it. Behind Bit is a simplified decision tree. FLIP: Want to sort messages, for example? A naïve Bayes classifier is super fast and much cheaper than most neural nets. BIT: Gotta make hiring choices? A lot of people still use decision trees. Easy to understand, easy to review!
SCENE 86: Martha sits, frustrated, at the top of the stairs as Flip approaches. Bit holds out a large framed image of a support vector machine representation. BIT: Ooh, ooh, and support vector machines are powerful classifiers! FLIP: Who doesn’t love a wide margin? MARTHA: But... But...

SCENE 87: Flip and Bit approach Martha with good-natured sympathy as she levels with them. MARTHA: I still wanna LEARN about neural networks, because... Because they... BIT: Because they’re cool? MARTHA (Smaller letters, extra space after “yeah...”): Yeah... Because they’re cool. FLIP: They ARE pretty cool!

SCENE 88: Martha stands, newly confident and excited. MARTHA: Y’know what? Maybe I will need a neural network and maybe I won’t, but there’s only one way to be SURE. I’m ready to go through this door and face the FUTURE. Now let’s have that KEY!

SCENE 89: Bit hands Martha the key. Martha looks to the side (to the audience?), as Flip calls for the last panel. BIT: You know we were always going to give you the key, right? MARTHA: Pft. Well, yeah... This’d be a really weird comic if you didn’t! FLIP: Cue last panel!
SCENE 90: Flip’s head at top with a big word balloon. At center, close-up of Martha’s hand about to put the key in the lock to open the door. FLIP: Next stop: NEURAL NETWORKS! NARRATOR: LEARN MORE about the fast-changing world of machine learning and STAY TUNED for Part Two: A Deep Dive Into Deep Learning.
- Script by Dylan Meconis, Scott McCloud, Syne Mitchell
- Art by Dylan Meconis
- Color by Jenn Manley Lee
- Japanese localization by Kaz Sato, Mariko Ogawa
- Produced by the Google Comics Factory (Allen Tsai, Alison Lentz, Michael Richardson)