Este guia mostra como executar uma tarefa de pesquisa de arquitetura neural do Vertex AI usando os espaços de pesquisa predefinidos e o código de preparação predefinido da Google com base no TF-vision para o MnasNet e o SpineNet. Consulte o bloco de notas de classificação MnasNet e o bloco de notas de deteção de objetos SpineNet para ver exemplos completos.
Preparação de dados para o preparador pré-criado
O preparador pré-criado da Neural Architecture Search requer que os seus dados estejam no formato TFRecord e contenham tf.train.Examples. Os tf.train.Examples têm de incluir os seguintes campos:
'image/encoded': tf.FixedLenFeature(tf.string)
'image/height': tf.FixedLenFeature(tf.int64)
'image/width': tf.FixedLenFeature(tf.int64)
# For image classification only.
'image/class/label': tf.FixedLenFeature(tf.int64)
# For object detection only.
'image/object/bbox/xmin': tf.VarLenFeature(tf.float32)
'image/object/bbox/xmax': tf.VarLenFeature(tf.float32)
'image/object/bbox/ymin': tf.VarLenFeature(tf.float32)
'image/object/bbox/ymax': tf.VarLenFeature(tf.float32)
'image/object/class/label': tf.VarLenFeature(tf.int64)
Pode seguir as instruções para a preparação de dados do ImageNet aqui.
Para converter os seus dados personalizados, use o script de análise incluído no código de exemplo e nas utilidades que transferiu. Para personalizar a análise sintática de dados, modifique os ficheiros tf_vision/dataloaders/*_input.py.
Saiba mais sobre
TFRecord e tf.train.Example.
Defina variáveis de ambiente da experiência
Antes de executar as experiências, tem de definir várias variáveis de ambiente, incluindo:
- TRAINER_DOCKER_ID:
${USER}_nas_experiment(formato recomendado) Localizações do Cloud Storage dos conjuntos de dados de validação e de preparação que a experiência vai usar. Por exemplo (CoCo para deteção):
gs://cloud-samples-data/ai-platform/built-in/image/coco/train*gs://cloud-samples-data/ai-platform/built-in/image/coco/val*
Localização do Cloud Storage para o resultado da experiência. Formato recomendado:
gs://${USER}_nas_experiment
REGION: uma região que deve ser igual à região do bucket de saída da experiência. Por exemplo:
us-central1.PARAM_OVERRIDE: um ficheiro .yaml que substitui os parâmetros do preparador pré-criado. A pesquisa de arquitetura neural oferece algumas configurações predefinidas que pode usar:
PROJECT_ID=PROJECT_ID
TRAINER_DOCKER_ID=TRAINER_DOCKER_ID
LATENCY_CALCULATOR_DOCKER_ID=LATENCY_CALCULATOR_DOCKER_ID
GCS_ROOT_DIR=OUTPUT_DIR
REGION=REGION
PARAM_OVERRIDE=tf_vision/configs/experiments/spinenet_search_gpu.yaml
TRAINING_DATA_PATH=gs://PATH_TO_TRAINING_DATA
VALIDATION_DATA_PATH=gs://PATH_TO_VALIDATION_DATA
É recomendável selecionar e/ou modificar o ficheiro de substituição que corresponde aos seus requisitos de formação. Considere o seguinte:
- Pode definir
--accelerator_typepara escolher entre GPU ou CPU. Para executar apenas algumas épocas para testes rápidos com a CPU, pode definir a flag--accelerator_type=""e usar o ficheiro de configuraçãotf_vision/test_files/fast_nas_detection_spinenet_search_for_testing.yaml. - Número de épocas
- Tempo de execução da preparação
- Hiperparâmetros, como a taxa de aprendizagem
Para ver uma lista de todos os parâmetros para controlar as tarefas de preparação, consulte
tf_vision/configs/. Seguem-se os parâmetros principais:
task:
train_data:
global_batch_size: 80
validation_data:
global_batch_size: 16
init_checkpoint: null
trainer:
train_steps: 16634
steps_per_loop: 1386
optimizer_config:
learning_rate:
cosine:
initial_learning_rate: 0.16
decay_steps: 16634
type: 'cosine'
warmup:
type: 'linear'
linear:
warmup_learning_rate: 0.0067
warmup_steps: 1386
Crie um contentor do Cloud Storage para que o Neural Architecture Search armazene os resultados dos seus trabalhos (ou seja, pontos de verificação):
gcloud storage buckets create $GCS_ROOT_DIR
Crie um contentor de formador e um contentor de calculadora de latência
O seguinte comando cria uma imagem de formador em Google Cloud com o seguinte URI:
gcr.io/PROJECT_ID/TRAINER_DOCKER_ID que vai ser usado na tarefa de pesquisa de arquitetura neural no passo seguinte.
python3 vertex_nas_cli.py build \
--project_id=PROJECT_ID \
--trainer_docker_id=TRAINER_DOCKER_ID \
--latency_calculator_docker_id=LATENCY_CALCULATOR_DOCKER_ID \
--trainer_docker_file=tf_vision/nas_multi_trial.Dockerfile \
--latency_calculator_docker_file=tf_vision/latency_computation_using_saved_model.Dockerfile
Para alterar o espaço de pesquisa e a recompensa, atualize-os no ficheiro Python e, em seguida, recrie a imagem do Docker.
Teste o formador localmente
Uma vez que o lançamento de uma tarefa no serviço Google Cloud demora vários minutos, pode ser mais
conveniente testar o Docker do formador localmente, por exemplo, validando o formato
TFRecord. Usando o espaço de pesquisa spinenet como exemplo, pode executar a tarefa de pesquisa localmente (o modelo é amostrado aleatoriamente):
# Define the local job output dir.
JOB_DIR="/tmp/iod_${search_space}"
python3 vertex_nas_cli.py search_in_local \
--project_id=PROJECT_ID \
--trainer_docker_id=TRAINER_DOCKER_ID \
--prebuilt_search_space=spinenet \
--use_prebuilt_trainer=True \
--local_output_dir=${JOB_DIR} \
--search_docker_flags \
params_override="tf_vision/test_files/fast_nas_detection_spinenet_search_for_testing.yaml" \
training_data_path=TEST_COCO_TF_RECORD \
validation_data_path=TEST_COCO_TF_RECORD \
model=retinanet
training_data_path e validation_data_path são os caminhos para os seus TFRecords.
Inicie uma pesquisa de fase 1 seguida de uma tarefa de preparação de fase 2 no Google Cloud
Deve consultar o bloco de notas de classificação MnasNet e o bloco de notas de deteção de objetos SpineNet para ver exemplos completos.
Pode definir o sinalizador
--max_parallel_nas_triale--max_nas_trialpara personalizar. O Neural Architecture Search iniciamax_parallel_nas_trialavaliações em paralelo e termina apósmax_nas_trialavaliações.Se a flag
--target_device_latency_msestiver definida, é iniciado um trabalholatency calculatorseparado com o acelerador especificado pela flag--target_device_type.O controlador de pesquisa de arquitetura neural fornece a cada tentativa uma sugestão para um novo candidato de arquitetura através da FLAG
--nas_params_str.Cada avaliação cria um gráfico com base no valor da FLAG
nas_params_stre inicia uma tarefa de preparação. Cada teste também guarda o respetivo valor num ficheiro JSON (emos.path.join(nas_job_dir, str(trial_id), "nas_params_str.json")).
Recompensa com uma restrição de latência
O notebook de classificação MnasNet mostra um exemplo de uma pesquisa baseada em dispositivos com restrições de latência de CPU na nuvem.
Para pesquisar modelos com restrição de latência, o preparador pode comunicar a recompensa como uma função da precisão e da latência.
No código fonte partilhado, a recompensa é calculada da seguinte forma:
def compute_reward(target_latency, accuracy, inference_latency, weight=0.07):
"""Compute reward from accuracy and latency."""
speed_ratio = target_latency / inference_latency
return accuracy * (speed_ratio**weight)
Pode usar outras variantes do cálculo reward na página 3
do documento mnasnet.
target_device_typeespecifica o tipo de dispositivo de destino que é suportado em Google Cloud, comoNVIDIA_TESLA_P100.use_prebuilt_latency_calculatorusa a nossatf_vision/latency_computation_using_saved_model.pycalculadora de latência pré-criada.target_device_latency_msespecifica a latência do dispositivo de destino.
Para obter informações sobre como personalizar a função de cálculo da latência,
consulte tf_vision/latency_computation_using_saved_model.py.
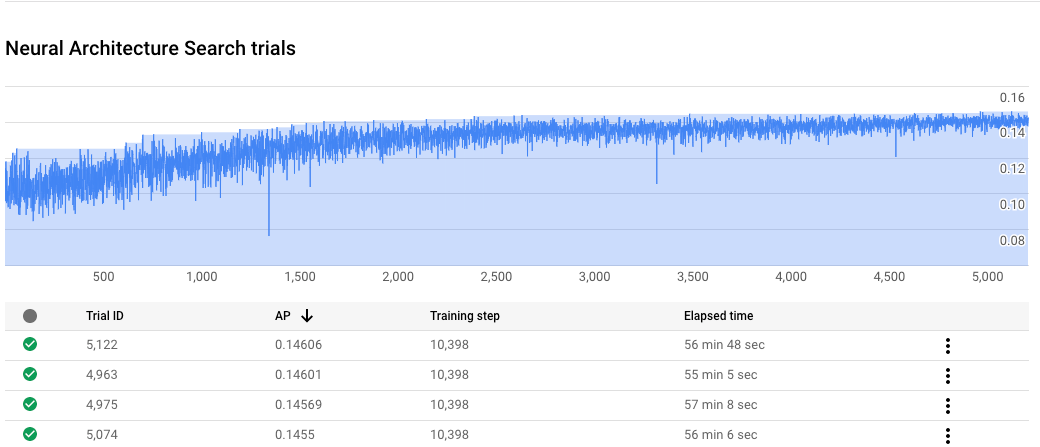
Monitorize o progresso da tarefa de pesquisa de arquitetura neural
Na Google Cloud consola, na página da tarefa, o gráfico mostra o reward vs. trial number, enquanto a tabela mostra as recompensas de cada teste. Pode encontrar as principais
experiências com a recompensa mais elevada.
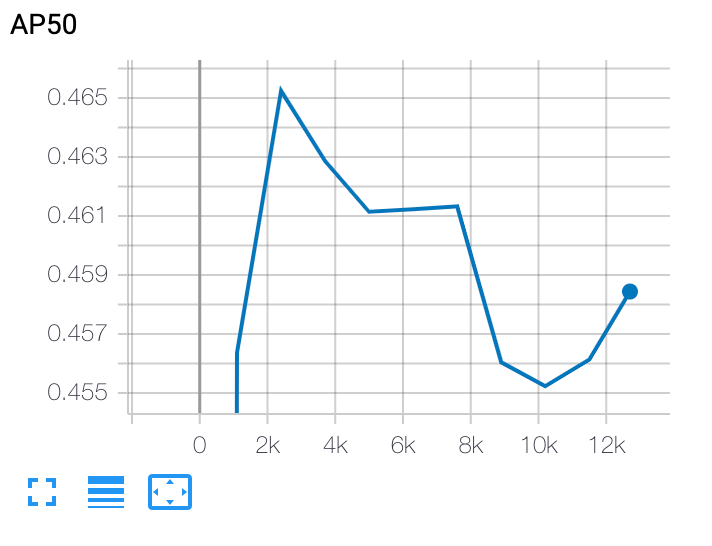
Represente graficamente uma curva de preparação da fase 2
Após a fase 2 da preparação, usa o Cloud Shell ou Google Cloud
TensorBoard para traçar
a curva de preparação apontando-a para o diretório de tarefas:
Implemente um modelo selecionado
Para criar um SavedModel, pode usar o script
export_saved_model.py
com o
params_override=${GCS_ROOT_DIR}/${TRIAL_ID}/params.yaml.