A Neural Architecture Search search space is key to achieving a good performance.
It defines all the
potential architectures or parameters to explore and search. Neural Architecture Search
provides a set of default search spaces in the
search_spaces.py
file:
MnasnetEfficientnet_v2NasfpnSpinenetSpinenet_v2Spinenet_mbconvSpinenet_scalingRandaugment_detectionRandaugment_segmentationAutoAugmentation_detectionAutoAugmentation_segmentation
In addition, we also provide the following search space examples:
- Lidar search space for 3D point clouds
- PyTorch 3D medical image segmentation search space example
- PyTorch MnasNet search space example
The Lidar notebook publishes verification results in the notebook. The rest of the PyTorch search spaces code are to be used as an example only and not for benchmarking.
Each of these search spaces has a specific use case:
- MNasNet search space is used for image classification and object detection tasks and is based upon MobileNetV2 architecture.
- EfficientNetV2 search space is used for object detection tasks. EfficientNetV2 adds new operations, such as Fused-MBConv. See the EfficientNetV2 paper for more details.
- NAS-FPN search space is typically used for object detection. You can find a detailed description in this section.
The SpineNet family of search spaces include
spinenet,spinenet_v2,spinenet_mbconv, andspinenet_scaling. These are typically used for object detection as well. You can find a detailed description for SpineNet in this section.spinenetis the base search space in this family, offering both residual and bottleneck block candidates during search.spinenet_v2offers a smaller version ofspinenet, which can help in faster convergence, offering only bottleneck block candidates during search.spinenet_mbconvoffers a version ofspinenetfor mobile platforms and uses mbconv block candidates during search.spinenet_scalingis typically used after finding a good architecture by usingspinenetsearch space to scale it up or down to meet latency requirements. This search is done over things such as image size, number of filters, filter size, and number of block repeats.
RandAugment and AutoAugment search spaces let you search for optimum data augmentation operations for detection and segmentation, respectively. Note: Data augmentation is typically used after a good model has been searched already. You can find a detailed description for DataAugmentation in this section.
Lidar search space for 3D point clouds shows end-to-end search on featurizer, backbone, decoder and detection head.
PyTorch 3D medical image segmentation search space example shows search on UNet encoder and UNet decoder.
Most of the time, these default search spaces are sufficient. However, if needed, you can customize these existing ones, or add a new one as required using the PyGlove library. See the example code to specify the NAS-FPN search space.
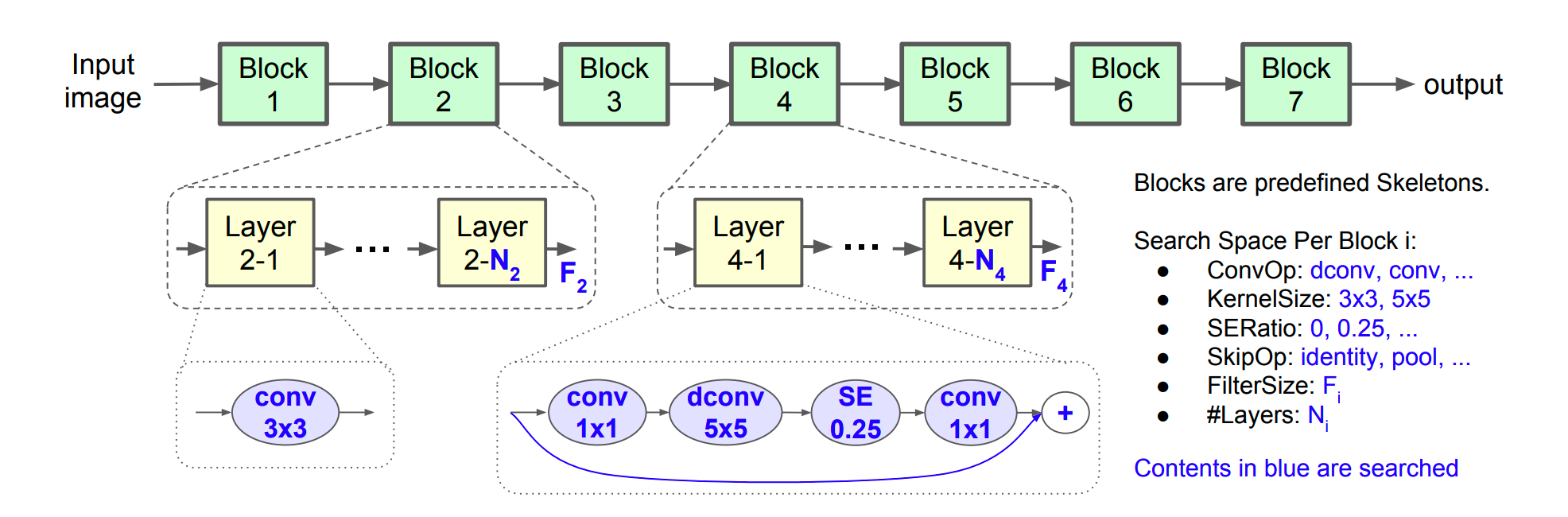
MNasnet and EfficientNetV2 search space
The MNasNet and EfficientV2 search spaces define different backbone building
options such as ConvOps, KernelSize, and ChannelSize. The backbone can be
used for different tasks like classification and detection.
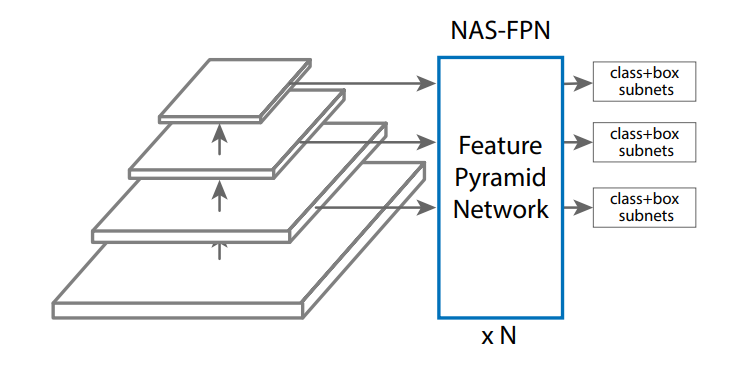
NAS-FPN search space
The NAS-FPN search space defines the search space in the FPN layers that connect different levels of features for object detection as shown in the following figure.
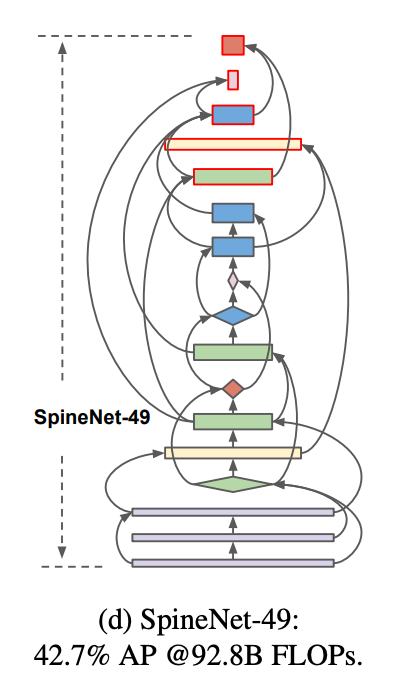
SpineNet search space
The SpineNet search space enables searching for a backbone with scale-permuted intermediate features and cross-scale connections, achieving state-of-the-art performance of one-stage object detection on COCO with 60% less computation, and outperforms ResNet-FPN counterparts by 6% AP. The following are connections of backbone layers in the searched SpineNet-49 architecture.
Data augmentation search space
After the best architecture has been searched already, you can also search for a best data augmentation policy. Data augmentation can further improve the accuracy of the previously searched architecture.
The Neural Architecture Search platform provides RandAugment and AutoAugment augmentation search spaces for two tasks: (a) randaugment_detection for object detection and (b) randaugment_segmentation for segmentation. It internally chooses between a list of augmentation operations such as auto-contrast, shear, or rotation to be applied to the training data.
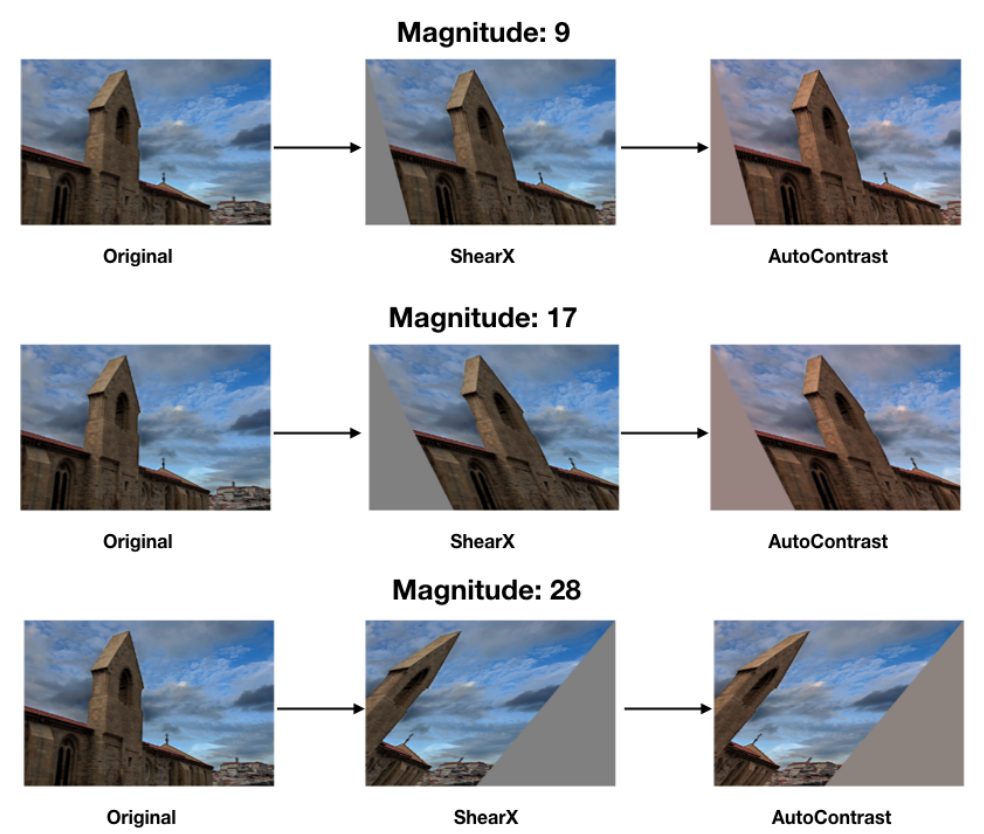
RandAugment search space
The RandAugment search space is configured by two parameters: (a) N
which is the number of successive augmentation operations to be applied to
an image and (b) M which is the magnitude of ALL of those operations. For
example, the following image shows an example where N=2 operations (Shear and
Contrast) with different M=magnitude are applied to an image.
For a given value of N, the list of operations are picked at random from the
operation bank. The augmentation search finds the best value of N and M for
the training job at hand. The search doesn't use a proxy task and therefore
runs the training jobs to the end.
AutoAugment search space
The AutoAugment search space lets you search for choice, magnitude, and
probability of operations, to optimize your model training.
The AutoAugment search space lets you search for the choices of the policy,
which RandAugment doesn't support.